 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLatent Space Element Method
Jan 05, 2026How can we build surrogate solvers that train on small domains but scale to larger ones without intrusive access to PDE operators? Inspired by the Data-Driven Finite Element Method (DD-FEM) framework for modular data-driven solvers, we propose the Latent Space Element Method (LSEM), an element-based latent surrogate assembly approach in which a learned subdomain ("element") model can be tiled and coupled to form a larger computational domain. Each element is a LaSDI latent ODE surrogate trained from snapshots on a local patch, and neighboring elements are coupled through learned directional interaction terms in latent space, avoiding Schwarz iterations and interface residual evaluations. A smooth window-based blending reconstructs a global field from overlapping element predictions, yielding a scalable assembled latent dynamical system. Experiments on the 1D Burgers and Korteweg-de Vries equations show that LSEM maintains predictive accuracy while scaling to spatial domains larger than those seen in training. LSEM offers an interpretable and extensible route toward foundation-model surrogate solvers built from reusable local models.
mLaSDI: Multi-stage latent space dynamics identification
Jun 12, 2025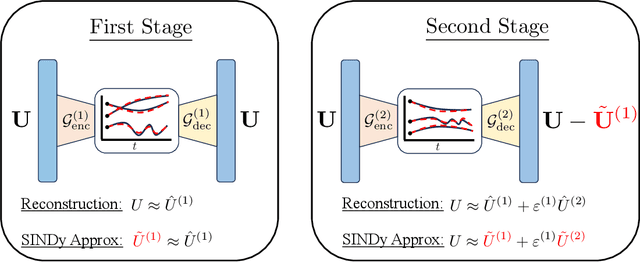

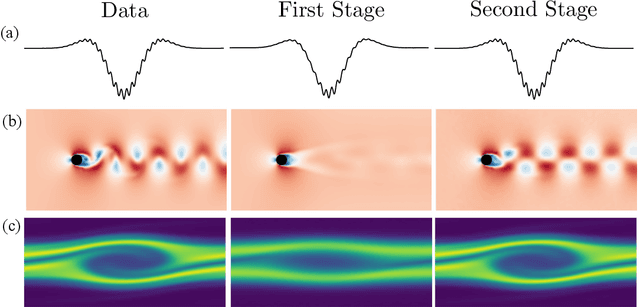
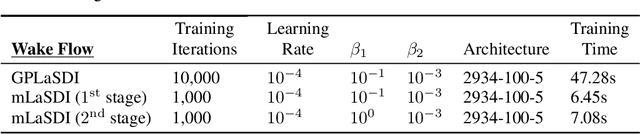
Determining accurate numerical solutions of partial differential equations (PDEs) is an important task in many scientific disciplines. However, solvers can be computationally expensive, leading to the development of reduced-order models (ROMs). Recently, Latent Space Dynamics Identification (LaSDI) was proposed as a data-driven, non-intrusive ROM framework. LaSDI compresses the training data using an autoencoder and learns a system of user-chosen ordinary differential equations (ODEs), which govern the latent space dynamics. This allows for rapid predictions by interpolating and evolving the low-dimensional ODEs in the latent space. While LaSDI has produced effective ROMs for numerous problems, the autoencoder can have difficulty accurately reconstructing training data while also satisfying the imposed dynamics in the latent space, particularly in complex or high-frequency regimes. To address this, we propose multi-stage Latent Space Dynamics Identification (mLaSDI). With mLaSDI, several autoencoders are trained sequentially in stages, where each autoencoder learns to correct the error of the previous stages. We find that applying mLaSDI with small autoencoders results in lower prediction and reconstruction errors, while also reducing training time compared to LaSDI.
Defining Foundation Models for Computational Science: A Call for Clarity and Rigor
May 28, 2025The widespread success of foundation models in natural language processing and computer vision has inspired researchers to extend the concept to scientific machine learning and computational science. However, this position paper argues that as the term "foundation model" is an evolving concept, its application in computational science is increasingly used without a universally accepted definition, potentially creating confusion and diluting its precise scientific meaning. In this paper, we address this gap by proposing a formal definition of foundation models in computational science, grounded in the core values of generality, reusability, and scalability. We articulate a set of essential and desirable characteristics that such models must exhibit, drawing parallels with traditional foundational methods, like the finite element and finite volume methods. Furthermore, we introduce the Data-Driven Finite Element Method (DD-FEM), a framework that fuses the modular structure of classical FEM with the representational power of data-driven learning. We demonstrate how DD-FEM addresses many of the key challenges in realizing foundation models for computational science, including scalability, adaptability, and physics consistency. By bridging traditional numerical methods with modern AI paradigms, this work provides a rigorous foundation for evaluating and developing novel approaches toward future foundation models in computational science.
Improved deep learning of chaotic dynamical systems with multistep penalty losses
Oct 08, 2024Predicting the long-term behavior of chaotic systems remains a formidable challenge due to their extreme sensitivity to initial conditions and the inherent limitations of traditional data-driven modeling approaches. This paper introduces a novel framework that addresses these challenges by leveraging the recently proposed multi-step penalty (MP) optimization technique. Our approach extends the applicability of MP optimization to a wide range of deep learning architectures, including Fourier Neural Operators and UNETs. By introducing penalized local discontinuities in the forecast trajectory, we effectively handle the non-convexity of loss landscapes commonly encountered in training neural networks for chaotic systems. We demonstrate the effectiveness of our method through its application to two challenging use-cases: the prediction of flow velocity evolution in two-dimensional turbulence and ocean dynamics using reanalysis data. Our results highlight the potential of this approach for accurate and stable long-term prediction of chaotic dynamics, paving the way for new advancements in data-driven modeling of complex natural phenomena.
Divide And Conquer: Learning Chaotic Dynamical Systems With Multistep Penalty Neural Ordinary Differential Equations
Jul 02, 2024Forecasting high-dimensional dynamical systems is a fundamental challenge in various fields, such as the geosciences and engineering. Neural Ordinary Differential Equations (NODEs), which combine the power of neural networks and numerical solvers, have emerged as a promising algorithm for forecasting complex nonlinear dynamical systems. However, classical techniques used for NODE training are ineffective for learning chaotic dynamical systems. In this work, we propose a novel NODE-training approach that allows for robust learning of chaotic dynamical systems. Our method addresses the challenges of non-convexity and exploding gradients associated with underlying chaotic dynamics. Training data trajectories from such systems are split into multiple, non-overlapping time windows. In addition to the deviation from the training data, the optimization loss term further penalizes the discontinuities of the predicted trajectory between the time windows. The window size is selected based on the fastest Lyapunov time scale of the system. Multi-step penalty(MP) method is first demonstrated on Lorenz equation, to illustrate how it improves the loss landscape and thereby accelerating the optimization convergence. MP method can optimize chaotic systems in a manner similar to least-squares shadowing with significantly lower computational costs. Our proposed algorithm, denoted the Multistep Penalty NODE(MP-NODE), is applied to chaotic systems such as the Kuramoto-Sivashinsky equation and the two-dimensional Kolmogorov flow. It is observed that MP-NODE provide viable performance for such chaotic systems, not only for short-term trajectory predictions but also for invariant statistics that are hallmarks of the chaotic nature of these dynamics.