 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePositioning Modular Co-Design in Future HRI Design Research
Feb 23, 2026Design-oriented HRI is increasingly interested in robots as long-term companions, yet many designs still assume a fixed form and a stable set of functions. We present an ongoing design research program that treats modularity as a designerly medium - a way to make long-term human-robot relationships discussable and material through co-design. Across a series of lifespan-oriented co-design activities, participants repeatedly reconfigured the same robot for different life stages, using modular parts to express changing needs, values, and roles. From these outcomes, we articulate PAS (Personalization-Adaptability-Sustainability) as a human-centered lens on how people enact modularity in practice: configuring for self-expression, adapting across transitions, and sustaining robots through repair, reuse, and continuity. We then sketch next steps toward a fabrication-aware, community-extensible modular platform and propose evaluation criteria for designerly HRI work that prioritize expressive adequacy, lifespan plausibility, repairability-in-use, and responsible stewardship - not only usability or performance.
Adding More Value Than Work: Practical Guidelines for Integrating Robots into Intercultural Competence Learning
Feb 08, 2026While social robots have demonstrated effectiveness in supporting students' intercultural competence development, it is unclear how they can effectively be adopted for integrated use in K-12 schools. We conducted two phases of design workshops with teachers, where they co-designed robot-mediated intercultural activities while considering student needs and school integration concerns. Using thematic analysis, we identify appropriate scenarios and roles for classroom robots, explore how robots could complement rather than replace teachers, and consider how to address ethical and compliance considerations. Our findings provide practical design guidelines for the HRI community to develop social robots that can effectively support intercultural education in K-12 schools.
Designing a minimalist socially aware robotic agent for the home
Jun 26, 2014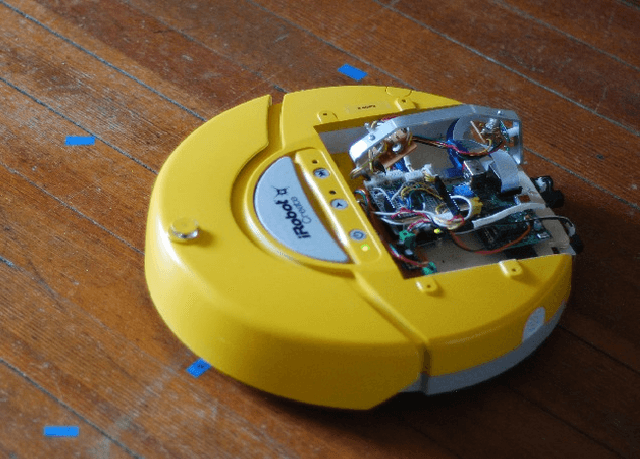
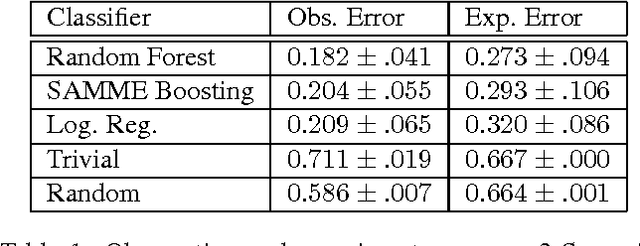
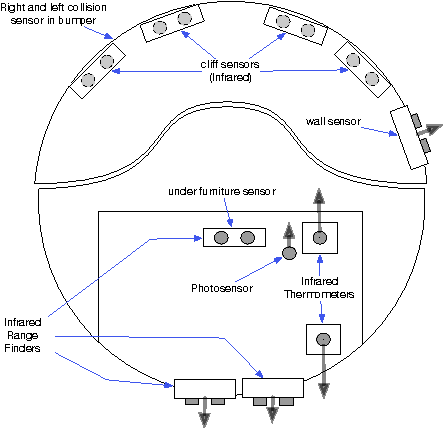
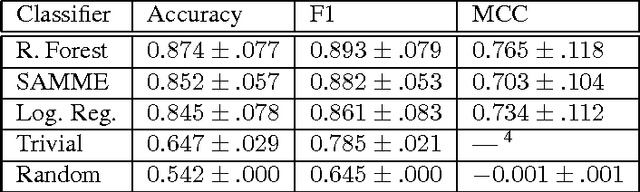
We present a minimalist social robot that relies on long timeseries of low resolution data such as mechanical vibration, temperature, lighting, sounds and collisions. Our goal is to develop an experimental system for growing socially situated robotic agents whose behavioral repertoire is subsumed by the social order of the space. To get there we are designing robots that use their simple sensors and motion feedback routines to recognize different classes of human activity and then associate to each class a range of appropriate behaviors. We use the Katie Family of robots, built on the iRobot Create platform, an Arduino Uno, and a Raspberry Pi. We describe its sensor abilities and exploratory tests that allow us to develop hypotheses about what objects (sensor data) correspond to something known and observable by a human subject. We use machine learning methods to classify three social scenarios from over a hundred experiments, demonstrating that it is possible to detect social situations with high accuracy, using the low-resolution sensors from our minimalist robot.