 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of a Machine-Learning System to Classify Lung CT Scan Images into Normal/COVID-19 Class
Apr 24, 2020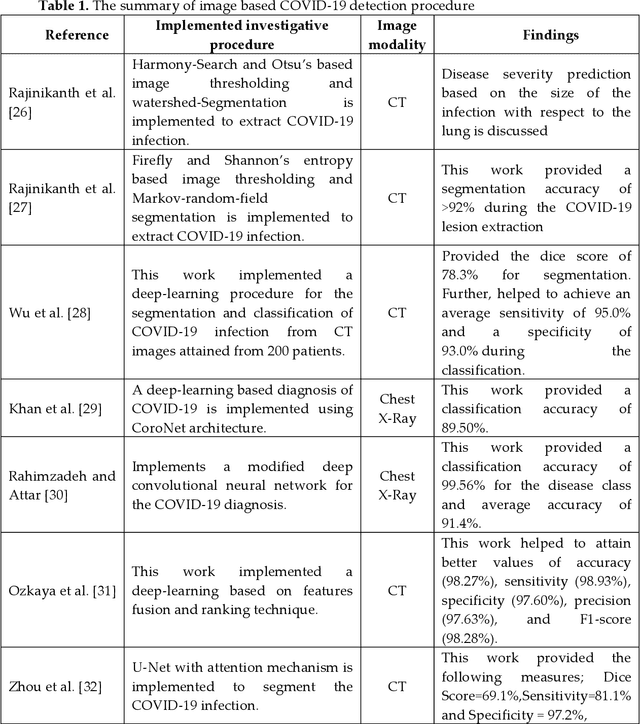
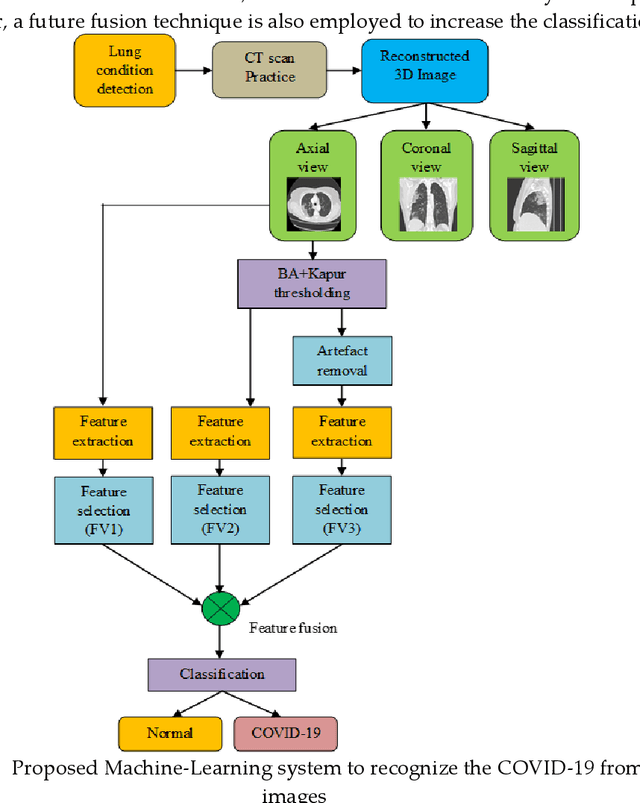

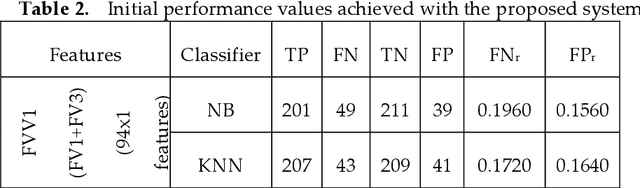
Recently, the lung infection due to Coronavirus Disease (COVID-19) affected a large human group worldwide and the assessment of the infection rate in the lung is essential for treatment planning. This research aims to propose a Machine-Learning-System (MLS) to detect the COVID-19 infection using the CT scan Slices (CTS). This MLS implements a sequence of methods, such as multi-thresholding, image separation using threshold filter, feature-extraction, feature-selection, feature-fusion and classification. The initial part implements the Chaotic-Bat-Algorithm and Kapur's Entropy (CBA+KE) thresholding to enhance the CTS. The threshold filter separates the image into two segments based on a chosen threshold 'Th'. The texture features of these images are extracted, refined and selected using the chosen procedures. Finally, a two-class classifier system is implemented to categorize the chosen CTS (n=500 with a pixel dimension of 512x512x1) into normal/COVID-19 group. In this work, the classifiers, such as Naive Bayes (NB), k-Nearest Neighbors (KNN), Decision Tree (DT), Random Forest (RF) and Support Vector Machine with linear kernel (SVM) are implemented and the classification task is performed using various feature vectors. The experimental outcome of the SVM with Fused-Feature-Vector (FFV) helped to attain a detection accuracy of 89.80%.
Implementation of Deep Neural Networks to Classify EEG Signals using Gramian Angular Summation Field for Epilepsy Diagnosis
Mar 08, 2020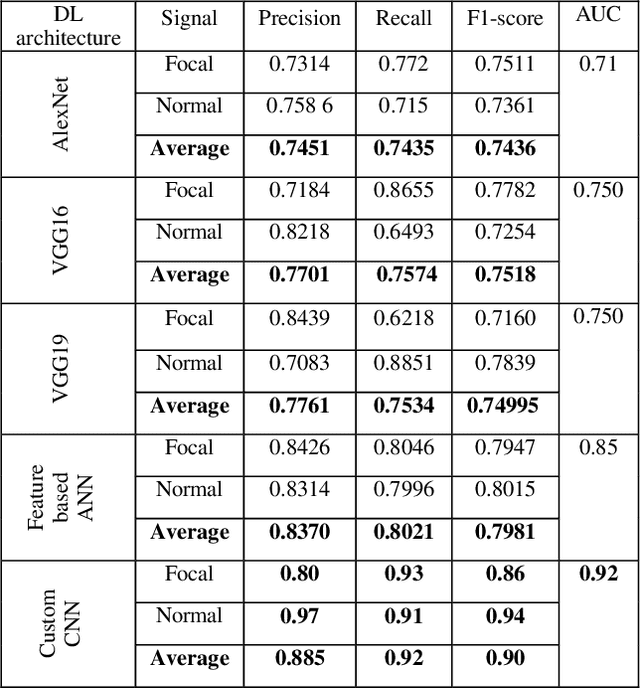
This paper evaluates the approach of imaging timeseries data such as EEG in the diagnosis of epilepsy through Deep Neural Network (DNN). EEG signal is transformed into an RGB image using Gramian Angular Summation Field (GASF). Many such EEG epochs are transformed into GASF images for the normal and focal EEG signals. Then, some of the widely used Deep Neural Networks for image classification problems are used here to detect the focal GASF images. Three pre-trained DNN such as the AlexNet, VGG16, and VGG19 are validated for epilepsy detection based on the transfer learning approach. Furthermore, the textural features are extracted from GASF images, and prominent features are selected for a multilayer Artificial Neural Network (ANN) classifier. Lastly, a Custom Convolutional Neural Network (CNN) with three CNN layers, Batch Normalization, Max-pooling layer, and Dense layers, is proposed for epilepsy diagnosis from GASF images. The results of this paper show that the Custom CNN model was able to discriminate against the focal and normal GASF images with an average peak Precision of 0.885, Recall of 0.92, and F1-score of 0.90. Moreover, the Area Under the Curve (AUC) value of the Receiver Operating Characteristic (ROC) curve is 0.92 for the Custom CNN model. This paper suggests that Deep Learning methods widely used in image classification problems can be an alternative approach for epilepsy detection from EEG signals through GASF images.
New design of Robotics Remote lab
Dec 25, 2012



The Robotic Remote Laboratory controls the Robot labs via the Internet and applies the Robot experiment in easy and advanced way. If we want to enhance the RRL system, we must study requirements of the Robot experiment in a deeply way. One of key requirements of the Robot experiment is the Control algorithm that includes all important activities to affect the Robot; one of them relates the path or obstacle. Our goal is to produce a new design of the RRL includes a new treatment to the Control algorithm depends on isolation one of the Control algorithm's activities that relates the paths in a separated algorithm, i.e., design the (Path planning algorithm) is independent of the original Control algorithm. This aim can be achieved by depending on the light to produce the Light obstacle. To apply the Light obstacle, we need to hardware (Light control server and Light arms) and soft ware (path planning algorithm).The NXT 2.0 Robot will sense the Light obstacle depending on the Light sensor of it. The new design has two servers, one for the path (Light control server) and other for the other activities of the Control algorithm (Robot control server).The website of the new design includes three main parts (Lab Reservation, Open Lab, Download Simulation).We proposed a set of scenarios for organizing the reservation of the Remote Lab. Additionally, we developed an appropriate software to simulate the Robot and to practice it before usage the Remote lab.