 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWater Care: Water Surface Cleaning Bot and Water Body Surveillance System
Nov 24, 2021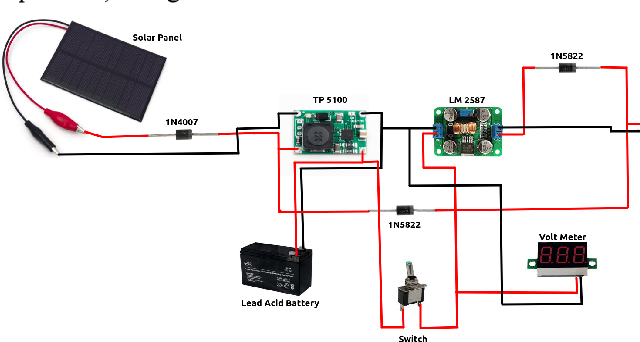
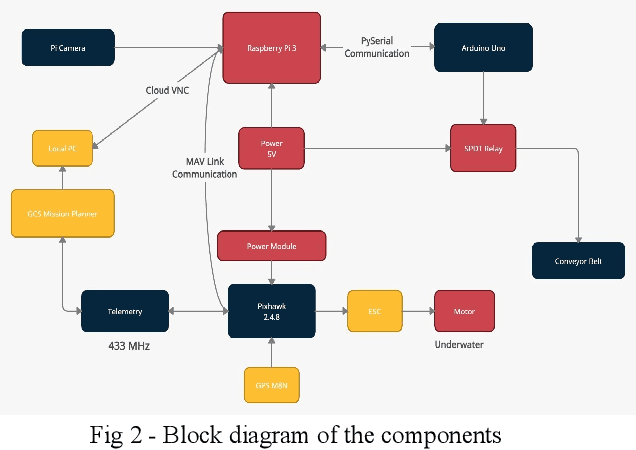
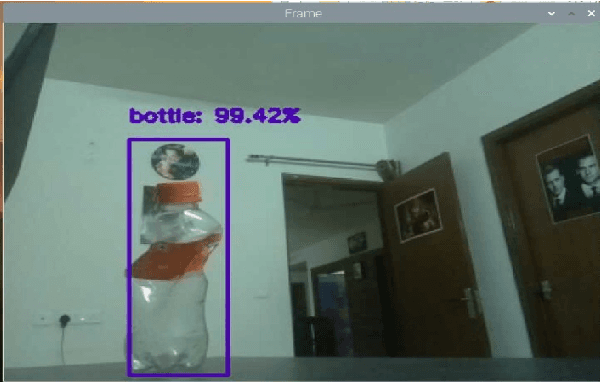
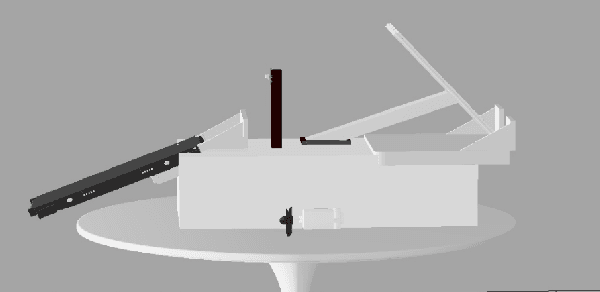
Whenever a person hears about pollution, more often than not, the first thought that comes to their mind is air pollution. One of the most under-mentioned and under-discussed pollution globally is that caused by the non-biodegradable waste in our water bodies. In the case of India, there is a lot of plastic waste on the surface of rivers and lakes. The Ganga river is one of the 10 rivers which account for 90 percent of the plastic that ends up in the sea and there are major cases of local nalaas and lakes being contaminated due to this waste. This limits the source of clean water which leads to major depletion in water sources. From 2001 to 2012, in the city of Hyderabad, 3245 hectares of lakes dissipated. The water recedes by nine feet a year on average in southern New Delhi. Thus, cleaning of these local water bodies and rivers is of utmost importance. Our aim is to develop a water surface cleaning bot that is deployed across the shore. The bot will detect garbage patches on its way and collect the garbage thus making the water bodies clean. This solution employs a surveillance mechanism in order to alert the authorities in case anyone is found polluting the water bodies. A more sustainable system by using solar energy to power the system has been developed. Computer vision algorithms are used for detecting trash on the surface of the water. This trash is collected by the bot and is disposed of at a designated location. In addition to cleaning the water bodies, preventive measures have been also implemented with the help of a virtual fencing algorithm that alerts the authorities if anyone tries to pollute the water premises. A web application and a mobile app is deployed to keep a check on the movement of the bot and shore surveillance respectively. This complete solution involves both preventive and curative measures that are required for water care.
Autonomous bot with ML-based reactive navigation for indoor environment
Nov 24, 2021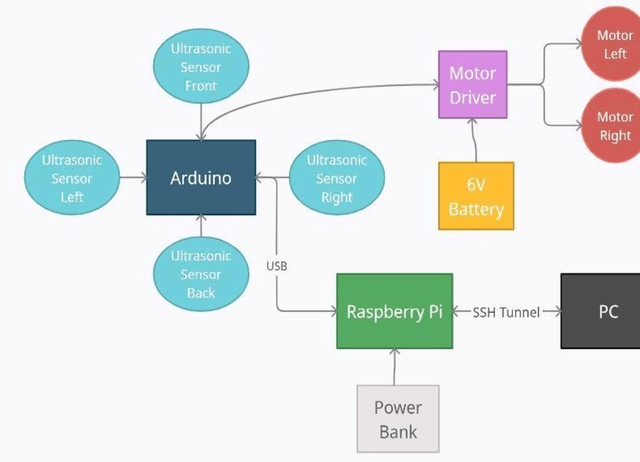
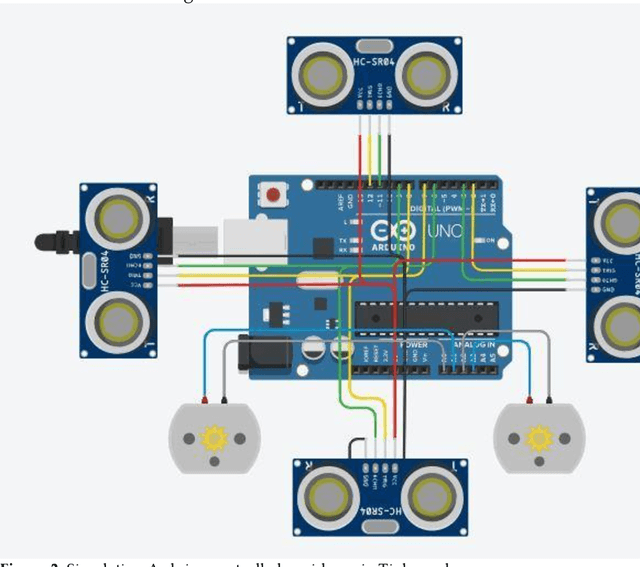
Local or reactive navigation is essential for autonomous mobile robots which operate in an indoor environment. Techniques such as SLAM, computer vision require significant computational power which increases cost. Similarly, using rudimentary methods makes the robot susceptible to inconsistent behavior. This paper aims to develop a robot that balances cost and accuracy by using machine learning to predict the best obstacle avoidance move based on distance inputs from four ultrasonic sensors that are strategically mounted on the front, front-left, front-right, and back of the robot. The underlying hardware consists of an Arduino Uno and a Raspberry Pi 3B. The machine learning model is first trained on the data collected by the robot. Then the Arduino continuously polls the sensors and calculates the distance values, and in case of critical need for avoidance, a suitable maneuver is made by the Arduino. In other scenarios, sensor data is sent to the Raspberry Pi using a USB connection and the machine learning model generates the best move for navigation, which is sent to the Arduino for driving motors accordingly. The system is mounted on a 2-WD robot chassis and tested in a cluttered indoor setting with most impressive results.