 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePanoramic Distortion-Aware Tokenization for Person Detection and Localization Using Transformers in Overhead Fisheye Images
Mar 18, 2025Person detection methods are used widely in applications including visual surveillance, pedestrian detection, and robotics. However, accurate detection of persons from overhead fisheye images remains an open challenge because of factors including person rotation and small-sized persons. To address the person rotation problem, we convert the fisheye images into panoramic images. For smaller people, we focused on the geometry of the panoramas. Conventional detection methods tend to focus on larger people because these larger people yield large significant areas for feature maps. In equirectangular panoramic images, we find that a person's height decreases linearly near the top of the images. Using this finding, we leverage the significance values and aggregate tokens that are sorted based on these values to balance the significant areas. In this leveraging process, we introduce panoramic distortion-aware tokenization. This tokenization procedure divides a panoramic image using self-similarity figures that enable determination of optimal divisions without gaps, and we leverage the maximum significant values in each tile of token groups to preserve the significant areas of smaller people. To achieve higher detection accuracy, we propose a person detection and localization method that combines panoramic-image remapping and the tokenization procedure. Extensive experiments demonstrated that our method outperforms conventional methods when applied to large-scale datasets.
Deep Single Image Camera Calibration by Heatmap Regression to Recover Fisheye Images Under ManhattanWorld AssumptionWithout Ambiguity
Mar 30, 2023
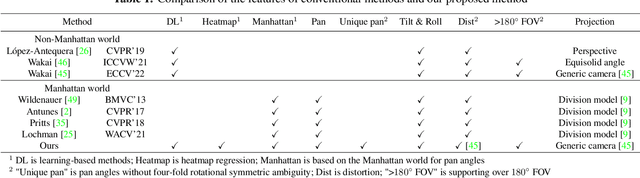
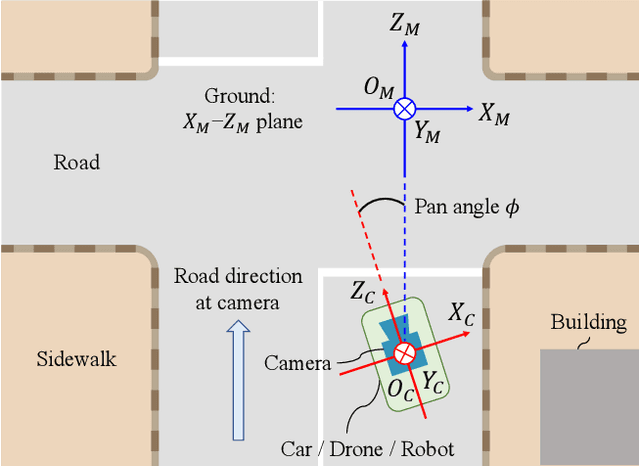
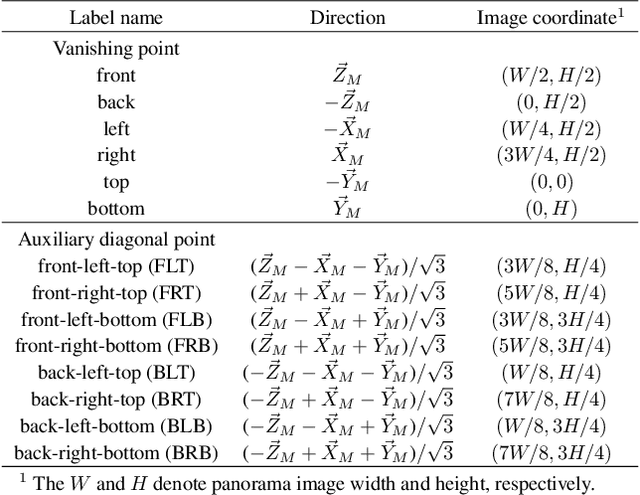
In orthogonal world coordinates, a Manhattan world lying along cuboid buildings is widely useful for various computer vision tasks. However, the Manhattan world has much room for improvement because the origin of pan angles from an image is arbitrary, that is, four-fold rotational symmetric ambiguity of pan angles. To address this problem, we propose a definition for the pan-angle origin based on the directions of the roads with respect to a camera and the direction of travel. We propose a learning-based calibration method that uses heatmap regression to remove the ambiguity by each direction of labeled image coordinates, similar to pose estimation keypoints. Simultaneously, our two-branched network recovers the rotation and removes fisheye distortion from a general scene image. To alleviate the lack of vanishing points in images, we introduce auxiliary diagonal points that have the optimal 3D arrangement of spatial uniformity. Extensive experiments demonstrated that our method outperforms conventional methods on large-scale datasets and with off-the-shelf cameras.
Rethinking Generic Camera Models for Deep Single Image Camera Calibration to Recover Rotation and Fisheye Distortion
Nov 25, 2021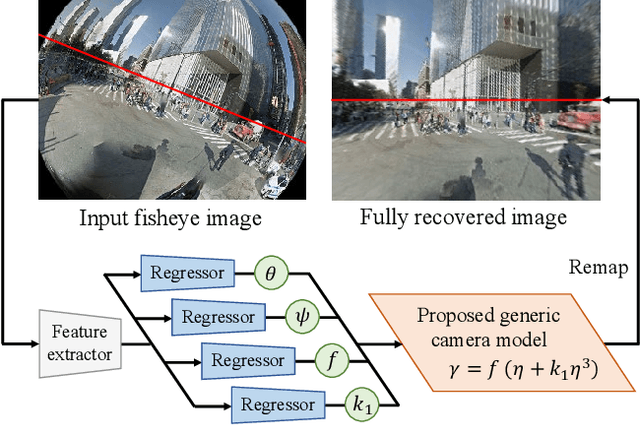
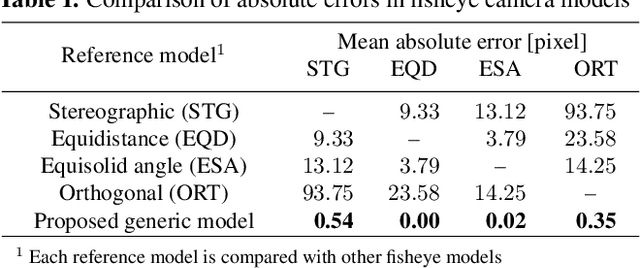
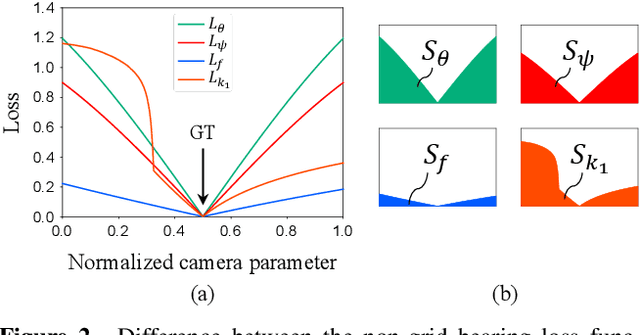
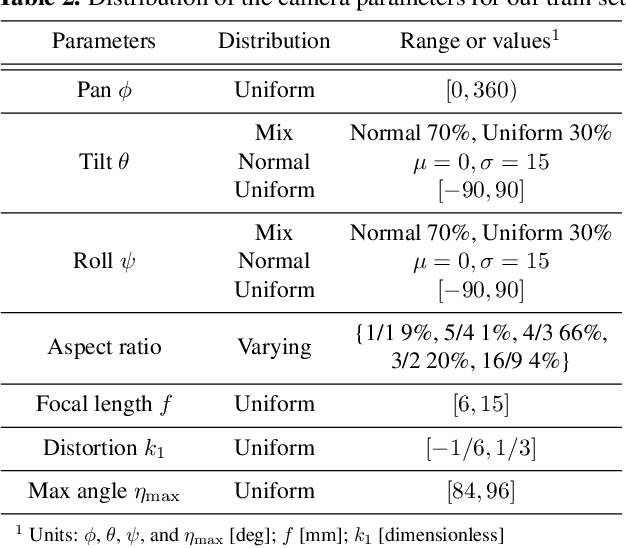
Although recent learning-based calibration methods can predict extrinsic and intrinsic camera parameters from a single image, the accuracy of these methods is degraded in fisheye images. This degradation is caused by mismatching between the actual projection and expected projection. To address this problem, we propose a generic camera model that has the potential to address various types of distortion. Our generic camera model is utilized for learning-based methods through a closed-form numerical calculation of the camera projection. Simultaneously to recover rotation and fisheye distortion, we propose a learning-based calibration method that uses the camera model. Furthermore, we propose a loss function that alleviates the bias of the magnitude of errors for four extrinsic and intrinsic camera parameters. Extensive experiments demonstrated that our proposed method outperformed conventional methods on two largescale datasets and images captured by off-the-shelf fisheye cameras. Moreover, we are the first researchers to analyze the performance of learning-based methods using various types of projection for off-the-shelf cameras.