 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Flood Forecasting with Dual State-Parameter Estimation and Ensemble-based SAR Data Assimilation
Nov 14, 2022
Ensemble data assimilation in flood forecasting depends strongly on the density, frequency and statistics of errors associated with the observation network. This work focuses on the assimilation of 2D flood extent data, expressed in terms of wet surface ratio, in addition to the in-situ water level data. The objective is to improve the representation of the flood plain dynamics with a TELEMAC-2D model and an Ensemble Kalman Filter (EnKF). The EnKF control vector is composed of friction coefficients and corrective parameters to the input forcing. It is augmented with the water level state averaged over selected subdomains of the floodplain. This work focuses on the 2019 flood event that occurred over the Garonne Marmandaise catchment. The merits of assimilating SAR-derived flood plain data complementary to in-situ water level observations are shown in the control parameter and observation spaces with 1D and 2D assessment metrics. It was also shown that the assimilation of Wet surface Ratio in the flood plain complementary to in-situ data in the river bed brings significative improvement when a corrective term on flood plain hydraulic state is included in the control vector. Yet, it has barely no impact in the river bed that is sufficiently well described by in-situ data. We highlighted that the correction of the hydraulic state in the flood plain significantly improved the flood dynamics, especially during the recession. This proof-of-concept study paves the way towards near-real-time flood forecast, making the most of remote sensing-derived flood observations.
Assimilation of SAR-derived Flood Observations for Improving Fluvial Flood Forecast
May 17, 2022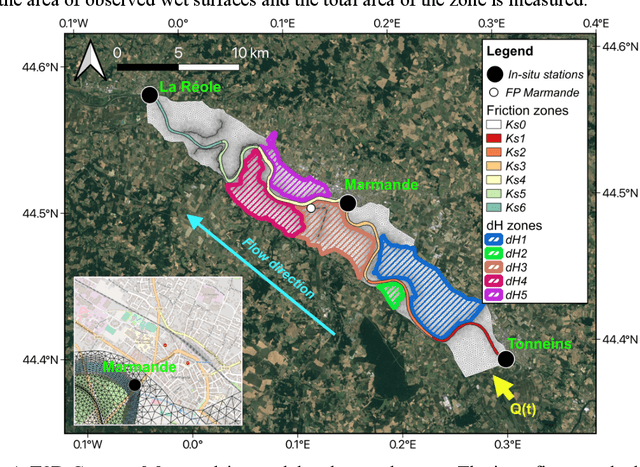
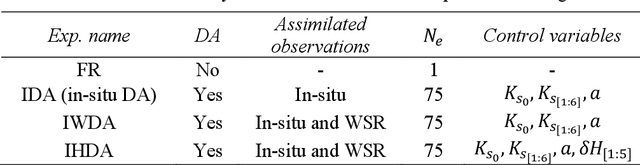
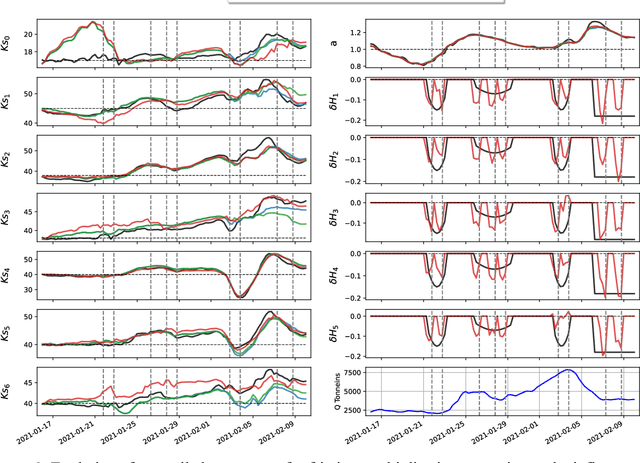
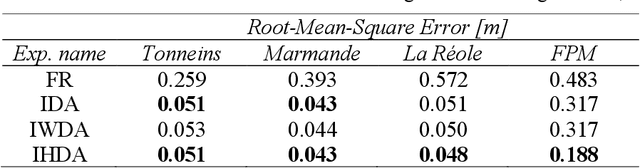
As the severity and occurrence of flood events tend to intensify with climate change, the need for flood forecasting capability increases. In this regard, the Flood Detection, Alert and rapid Mapping (FloodDAM) project, funded by Space for Climate Observatory initiatives, was set out to develop pre-operational tools dedicated to enabling quick responses in flood-prone areas, and to improve the reactivity of decision support systems. This work focuses on the assimilation of 2D flood extent data (expressed in terms of wet surface ratios) and in-situ water level data to improve the representation of the flood plain dynamics with a Telemac-2D model and an Ensemble Kalman Filter (EnKF). The EnKF control vector was composed friction coefficients and corrective parameter to the input forcing. It is then augmented with the water level state averaged over several floodplain zones. This work was conducted in the context of Observing System Simulation Experiments (OSSE) based on a real flood event occurred in January-February 2021 on the Garonne Marmandaise catchment. This allows to validate the observation operator associated to the wet surface ratio observations as well as the dual state-parameter sequential correction implemented in this work. The merits of assimilating SAR- derived flood plain data complementary to in-situ water level observations are shown in the control parameter and observation spaces with 1D and 2D assessment metrics. It was also shown that the correction of the hydraulic state significantly improved the flood dynamics, especially during the recession. This proof-of-concept study paves the way towards near-real-time flood forecast, making the most of remote sensing-derived flood observations.