 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEagle: End-to-end Deep Reinforcement Learning based Autonomous Control of PTZ Cameras
Apr 10, 2023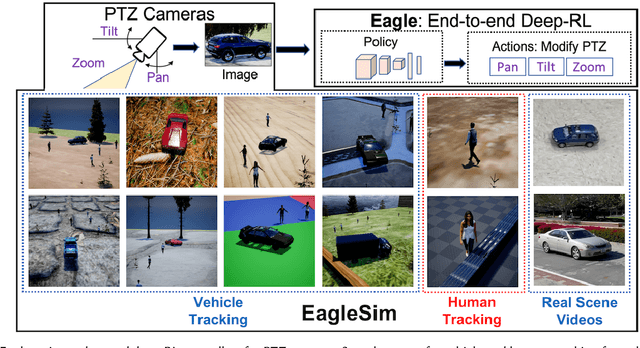

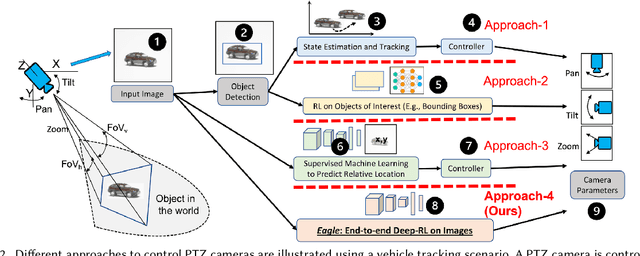
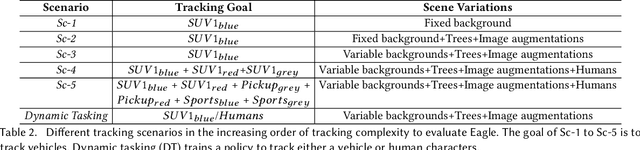
Existing approaches for autonomous control of pan-tilt-zoom (PTZ) cameras use multiple stages where object detection and localization are performed separately from the control of the PTZ mechanisms. These approaches require manual labels and suffer from performance bottlenecks due to error propagation across the multi-stage flow of information. The large size of object detection neural networks also makes prior solutions infeasible for real-time deployment in resource-constrained devices. We present an end-to-end deep reinforcement learning (RL) solution called Eagle to train a neural network policy that directly takes images as input to control the PTZ camera. Training reinforcement learning is cumbersome in the real world due to labeling effort, runtime environment stochasticity, and fragile experimental setups. We introduce a photo-realistic simulation framework for training and evaluation of PTZ camera control policies. Eagle achieves superior camera control performance by maintaining the object of interest close to the center of captured images at high resolution and has up to 17% more tracking duration than the state-of-the-art. Eagle policies are lightweight (90x fewer parameters than Yolo5s) and can run on embedded camera platforms such as Raspberry PI (33 FPS) and Jetson Nano (38 FPS), facilitating real-time PTZ tracking for resource-constrained environments. With domain randomization, Eagle policies trained in our simulator can be transferred directly to real-world scenarios.
Machine Learning for Microcontroller-Class Hardware -- A Review
Jun 06, 2022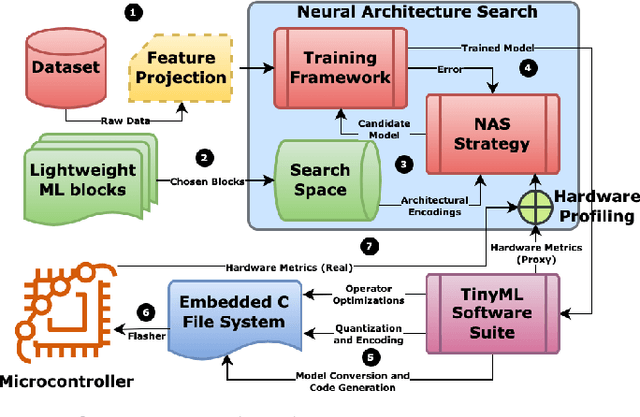
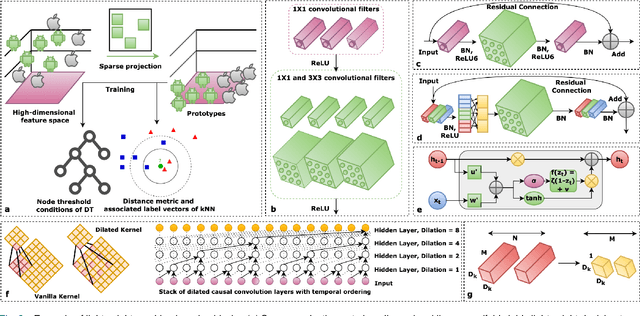
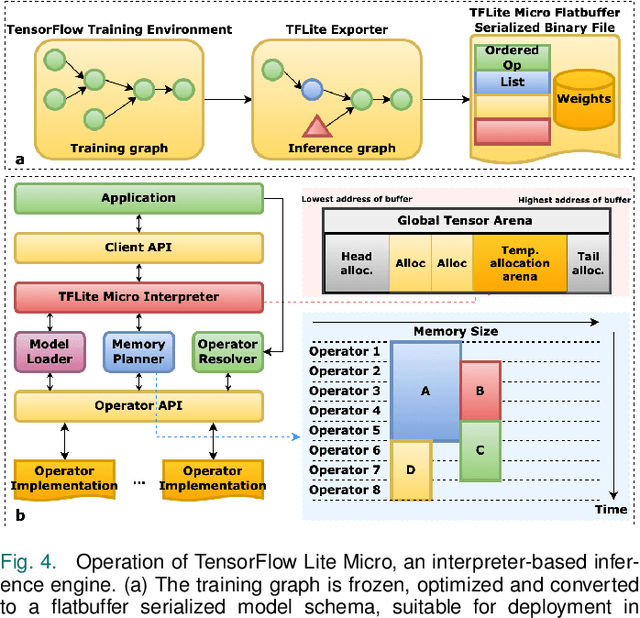

The advancements in machine learning opened a new opportunity to bring intelligence to the low-end Internet-of-Things nodes such as microcontrollers. Conventional machine learning deployment has high memory and compute footprint hindering their direct deployment on ultra resource-constrained microcontrollers. This paper highlights the unique requirements of enabling onboard machine learning for microcontroller class devices. Researchers use a specialized model development workflow for resource-limited applications to ensure the compute and latency budget is within the device limits while still maintaining the desired performance. We characterize a closed-loop widely applicable workflow of machine learning model development for microcontroller class devices and show that several classes of applications adopt a specific instance of it. We present both qualitative and numerical insights into different stages of model development by showcasing several use cases. Finally, we identify the open research challenges and unsolved questions demanding careful considerations moving forward.
MANGO: A Python Library for Parallel Hyperparameter Tuning
May 22, 2020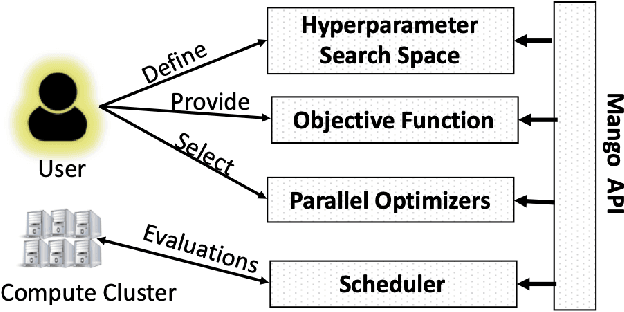
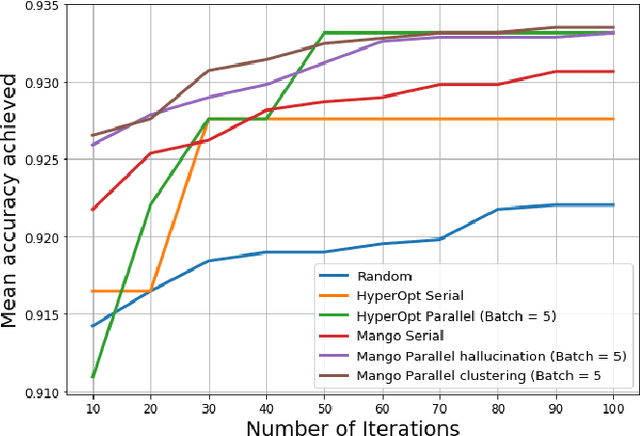
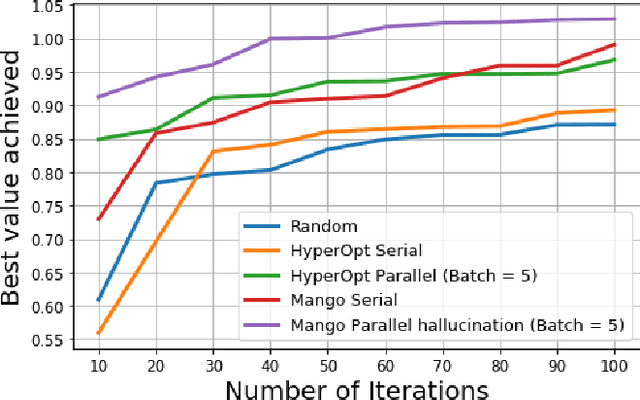
Tuning hyperparameters for machine learning algorithms is a tedious task, one that is typically done manually. To enable automated hyperparameter tuning, recent works have started to use techniques based on Bayesian optimization. However, to practically enable automated tuning for large scale machine learning training pipelines, significant gaps remain in existing libraries, including lack of abstractions, fault tolerance, and flexibility to support scheduling on any distributed computing framework. To address these challenges, we present Mango, a Python library for parallel hyperparameter tuning. Mango enables the use of any distributed scheduling framework, implements intelligent parallel search strategies, and provides rich abstractions for defining complex hyperparameter search spaces that are compatible with scikit-learn. Mango is comparable in performance to Hyperopt, another widely used library. Mango is available open-source and is currently used in production at Arm Research to provide state-of-art hyperparameter tuning capabilities.