 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Thompson sampling under constrained communication
Oct 21, 2024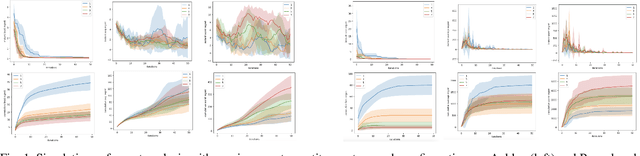
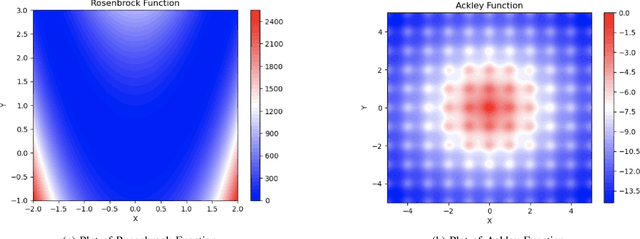
In Bayesian optimization, a black-box function is maximized via the use of a surrogate model. We apply distributed Thompson sampling, using a Gaussian process as a surrogate model, to approach the multi-agent Bayesian optimization problem. In our distributed Thompson sampling implementation, each agent receives sampled points from neighbors, where the communication network is encoded in a graph; each agent utilizes a Gaussian process to model the objective function. We demonstrate a theoretical bound on Bayesian Simple Regret, where the bound depends on the size of the largest complete subgraph of the communication graph. Unlike in batch Bayesian optimization, this bound is applicable in cases where the communication graph amongst agents is constrained. When compared to sequential Thompson sampling, our bound guarantees faster convergence with respect to time as long as there is a fully connected subgraph of at least two agents. We confirm the efficacy of our algorithm with numerical simulations on traditional optimization test functions, illustrating the significance of graph connectivity on improving regret convergence.