 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Exactly Linearizable Deep Dynamics Models
Nov 30, 2023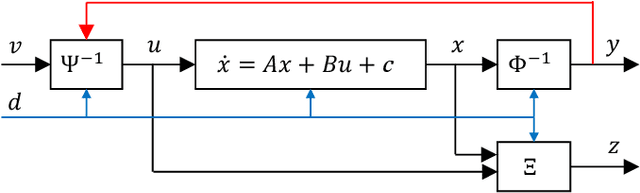
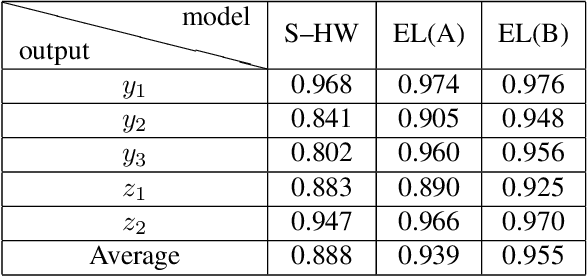
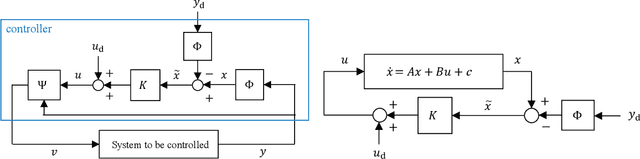
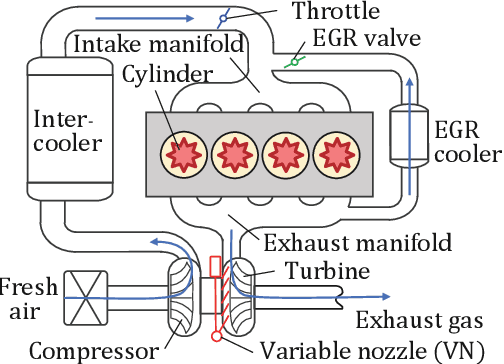
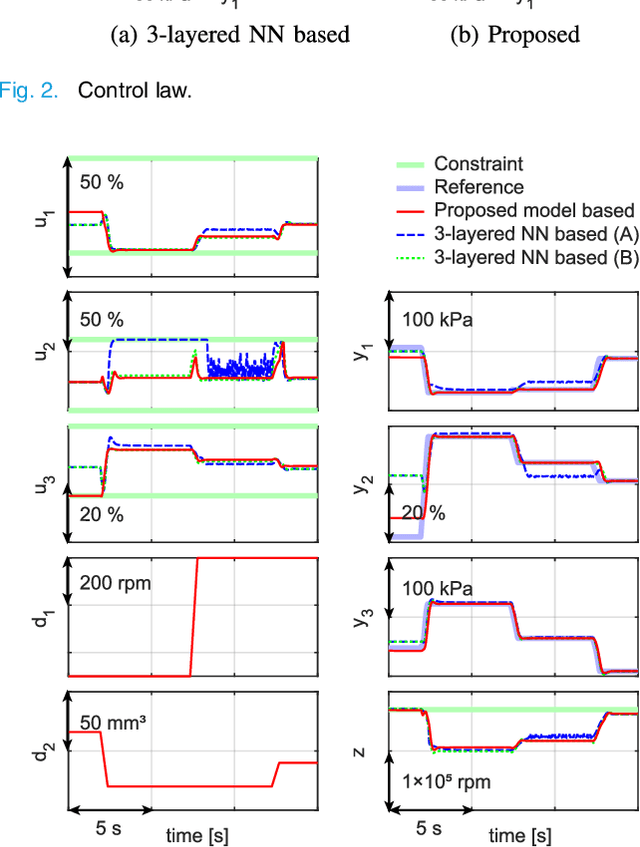
Research on control using models based on machine-learning methods has now shifted to the practical engineering stage. Achieving high performance and theoretically guaranteeing the safety of the system is critical for such applications. In this paper, we propose a learning method for exactly linearizable dynamical models that can easily apply various control theories to ensure stability, reliability, etc., and to provide a high degree of freedom of expression. As an example, we present a design that combines simple linear control and control barrier functions. The proposed model is employed for the real-time control of an automotive engine, and the results demonstrate good predictive performance and stable control under constraints.
Structured Hammerstein-Wiener Model Learning for Model Predictive Control
Jul 09, 2021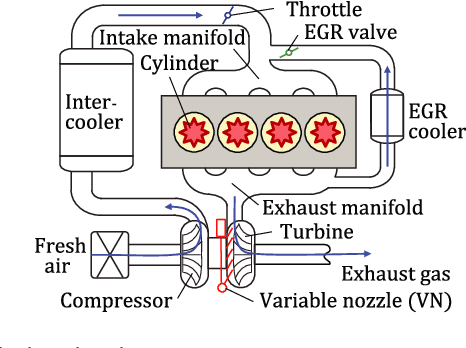

This paper aims to improve the reliability of optimal control using models constructed by machine learning methods. Optimal control problems based on such models are generally non-convex and difficult to solve online. In this paper, we propose a model that combines the Hammerstein-Wiener model with input convex neural networks, which have recently been proposed in the field of machine learning. An important feature of the proposed model is that resulting optimal control problems are effectively solvable exploiting their convexity and partial linearity while retaining flexible modeling ability. The practical usefulness of the method is examined through its application to the modeling and control of an engine airpath system.
* 6 pages, 3 figures