 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlocalFuse-Depth: Fusing Transformers and CNNs for All-day Self-supervised Monocular Depth Estimation
Feb 20, 2023

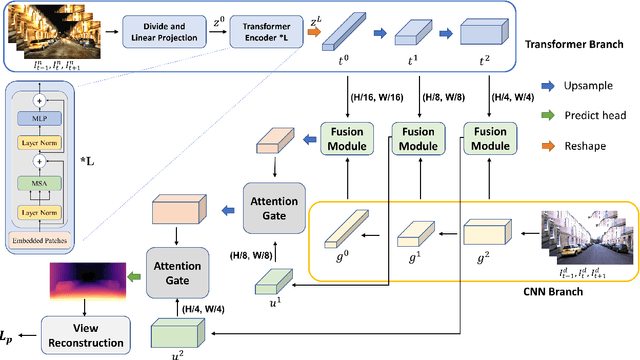

In recent years, self-supervised monocular depth estimation has drawn much attention since it frees of depth annotations and achieved remarkable results on standard benchmarks. However, most of existing methods only focus on either daytime or nighttime images, thus their performance degrades on the other domain because of the large domain shift between daytime and nighttime images. To address this problem, in this paper we propose a two-branch network named GlocalFuse-Depth for self-supervised depth estimation of all-day images. The daytime and nighttime image in input image pair are fed into the two branches: CNN branch and Transformer branch, respectively, where both fine-grained details and global dependency can be efficiently captured. Besides, a novel fusion module is proposed to fuse multi-dimensional features from the two branches. Extensive experiments demonstrate that GlocalFuse-Depth achieves state-of-the-art results for all-day images on the Oxford RobotCar dataset, which proves the superiority of our method.