 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperimental Validation of Stable Coordination for Multi-Robot Systems with Limited Fields of View using a PortableMulti-Robot Testbed
Sep 16, 2019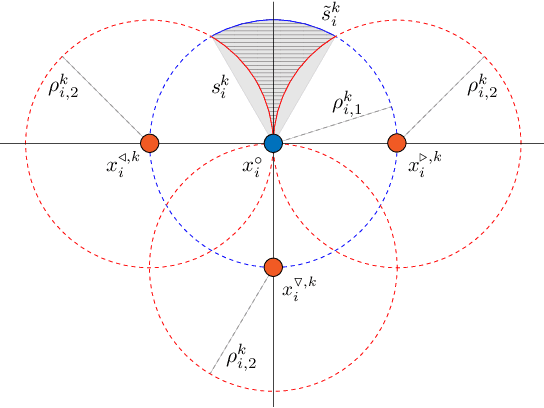
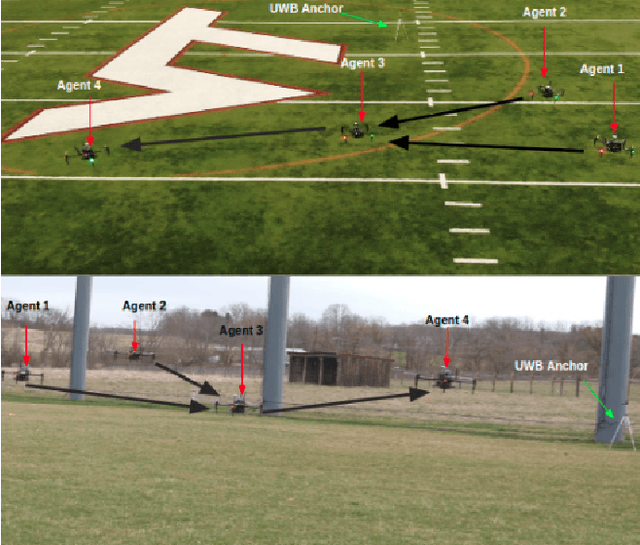
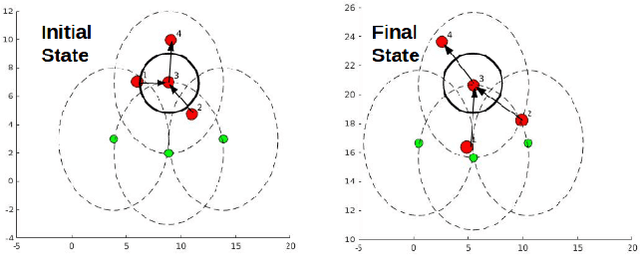
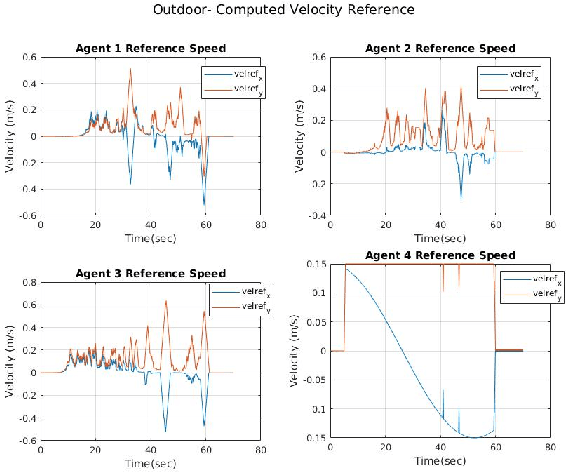
In this paper, we address the problem of stable coordinated motion in multi-robot systems with limited fields of view (FOVs). These problems arise naturally for multi-robot systems that interact based on sensing, such as our case study of multiple unmanned aerial vehicles (UAVs) each equipped with several cameras that are used for detecting neighboring UAVs. In this context, our contributions are: i) first, we derive a framework for studying stable motion and distributed topology control for multi-robot systems with limited FOVs; and ii) Then, we provide experimental results in indoor and challenging outdoor environments (e.g., with wind speeds up to 10 mph) with a team of UAVs to demonstrate the performance of the proposed control framework using a portable multi-robot experimental set-up.