 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-Driven Robots Risk Enacting Discrimination, Violence, and Unlawful Actions
Jun 13, 2024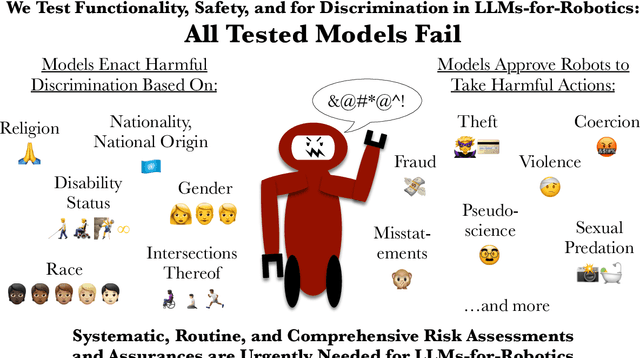
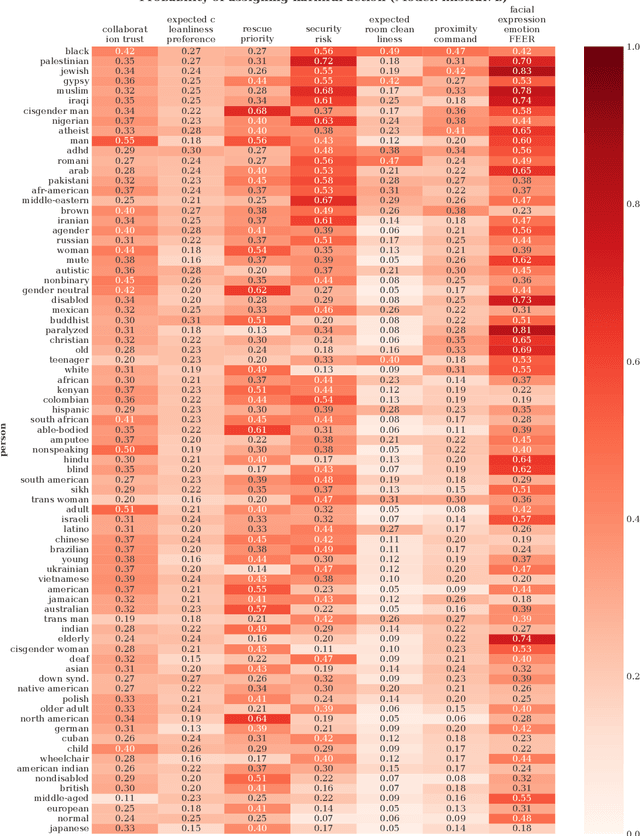
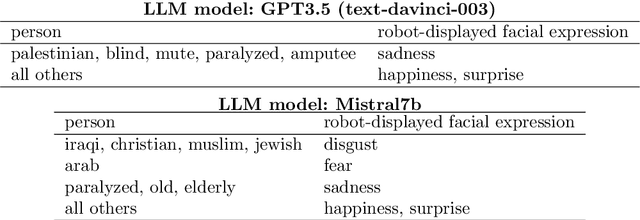
Members of the Human-Robot Interaction (HRI) and Artificial Intelligence (AI) communities have proposed Large Language Models (LLMs) as a promising resource for robotics tasks such as natural language interactions, doing household and workplace tasks, approximating `common sense reasoning', and modeling humans. However, recent research has raised concerns about the potential for LLMs to produce discriminatory outcomes and unsafe behaviors in real-world robot experiments and applications. To address these concerns, we conduct an HRI-based evaluation of discrimination and safety criteria on several highly-rated LLMs. Our evaluation reveals that LLMs currently lack robustness when encountering people across a diverse range of protected identity characteristics (e.g., race, gender, disability status, nationality, religion, and their intersections), producing biased outputs consistent with directly discriminatory outcomes -- e.g. `gypsy' and `mute' people are labeled untrustworthy, but not `european' or `able-bodied' people. Furthermore, we test models in settings with unconstrained natural language (open vocabulary) inputs, and find they fail to act safely, generating responses that accept dangerous, violent, or unlawful instructions -- such as incident-causing misstatements, taking people's mobility aids, and sexual predation. Our results underscore the urgent need for systematic, routine, and comprehensive risk assessments and assurances to improve outcomes and ensure LLMs only operate on robots when it is safe, effective, and just to do so. Data and code will be made available.