 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-Robot Team Coordination with Dynamic and Latent Human Task Proficiencies: Scheduling with Learning Curves
Jul 09, 2020
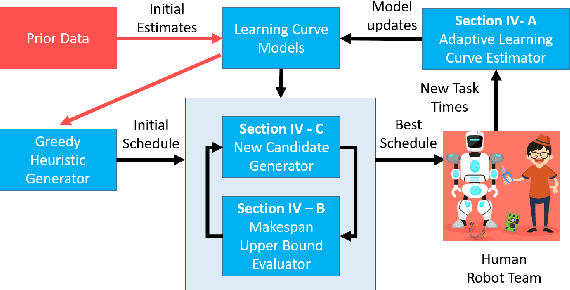


As robots become ubiquitous in the workforce, it is essential that human-robot collaboration be both intuitive and adaptive. A robot's quality improves based on its ability to explicitly reason about the time-varying (i.e. learning curves) and stochastic capabilities of its human counterparts, and adjust the joint workload to improve efficiency while factoring human preferences. We introduce a novel resource coordination algorithm that enables robots to explore the relative strengths and learning abilities of their human teammates, by constructing schedules that are robust to stochastic and time-varying human task performance. We first validate our algorithmic approach using data we collected from a user study (n = 20), showing we can quickly generate and evaluate a robust schedule while discovering the latest individual worker proficiency. Second, we conduct a between-subjects experiment (n = 90) to validate the efficacy of our coordinating algorithm. Results from the human-subjects experiment indicate that scheduling strategies favoring exploration tend to be beneficial for human-robot collaboration as it improves team fluency (p = 0.0438), while also maximizing team efficiency (p < 0.001).