 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrack detection using tap-testing and machine learning techniques to prevent potential rockfall incidents
Oct 10, 2021
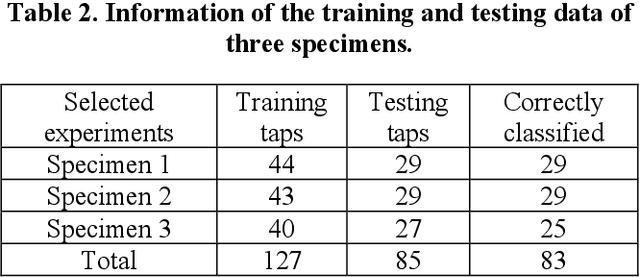
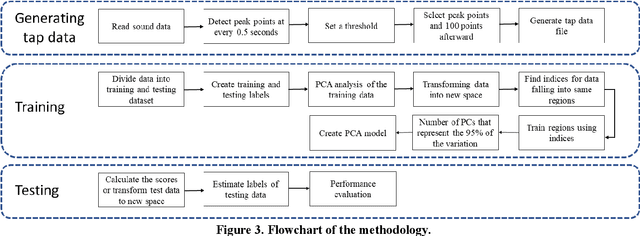
Rockfalls are a hazard for the safety of infrastructure as well as people. Identifying loose rocks by inspection of slopes adjacent to roadways and other infrastructure and removing them in advance can be an effective way to prevent unexpected rockfall incidents. This paper proposes a system towards an automated inspection for potential rockfalls. A robot is used to repeatedly strike or tap on the rock surface. The sound from the tapping is collected by the robot and subsequently classified with the intent of identifying rocks that are broken and prone to fall. Principal Component Analysis (PCA) of the collected acoustic data is used to recognize patterns associated with rocks of various conditions, including intact as well as rock with different types and locations of cracks. The PCA classification was first demonstrated simulating sounds of different characteristics that were automatically trained and tested. Secondly, a laboratory test was conducted tapping rock specimens with three different levels of discontinuity in depth and shape. A real microphone mounted on the robot recorded the sound and the data were classified in three clusters within 2D space. A model was created using the training data to classify the reminder of the data (the test data). The performance of the method is evaluated with a confusion matrix.