 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic creation of urban velocity fields from aerial video
Dec 07, 2009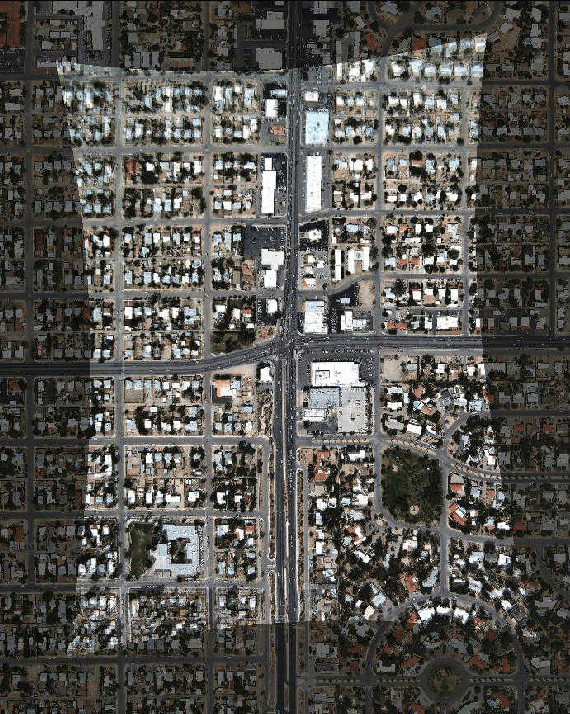

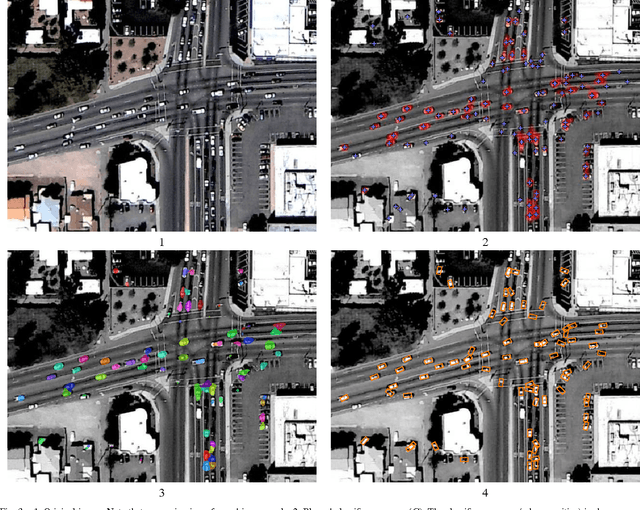
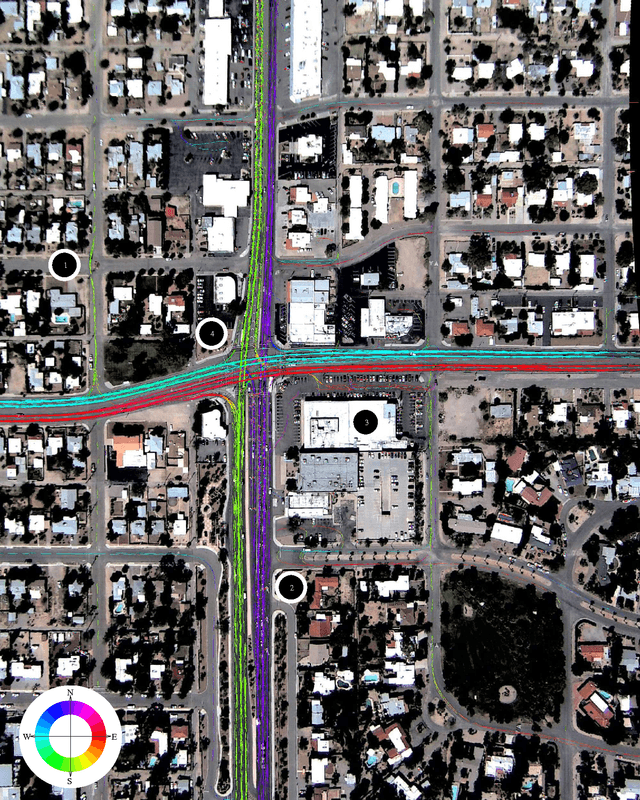
In this paper, we present a system for modelling vehicle motion in an urban scene from low frame-rate aerial video. In particular, the scene is modelled as a probability distribution over velocities at every pixel in the image. We describe the complete system for acquiring this model. The video is captured from a helicopter and stabilized by warping the images to match an orthorectified image of the area. A pixel classifier is applied to the stabilized images, and the response is segmented to determine car locations and orientations. The results are fed in to a tracking scheme which tracks cars for three frames, creating tracklets. This allows the tracker to use a combination of velocity, direction, appearance, and acceleration cues to keep only tracks likely to be correct. Each tracklet provides a measurement of the car velocity at every point along the tracklet's length, and these are then aggregated to create a histogram of vehicle velocities at every pixel in the image. The results demonstrate that the velocity probability distribution prior can be used to infer a variety of information about road lane directions, speed limits, vehicle speeds and common trajectories, and traffic bottlenecks, as well as providing a means of describing environmental knowledge about traffic rules that can be used in tracking.
Camera distortion self-calibration using the plumb-line constraint and minimal Hough entropy
Jan 04, 2009
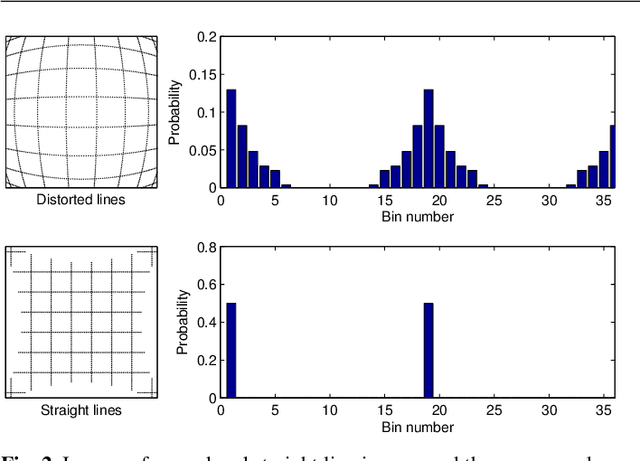


In this paper we present a simple and robust method for self-correction of camera distortion using single images of scenes which contain straight lines. Since the most common distortion can be modelled as radial distortion, we illustrate the method using the Harris radial distortion model, but the method is applicable to any distortion model. The method is based on transforming the edgels of the distorted image to a 1-D angular Hough space, and optimizing the distortion correction parameters which minimize the entropy of the corresponding normalized histogram. Properly corrected imagery will have fewer curved lines, and therefore less spread in Hough space. Since the method does not rely on any image structure beyond the existence of edgels sharing some common orientations and does not use edge fitting, it is applicable to a wide variety of image types. For instance, it can be applied equally well to images of texture with weak but dominant orientations, or images with strong vanishing points. Finally, the method is performed on both synthetic and real data revealing that it is particularly robust to noise.