 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoDefeater: Using LLMs To Find Defeaters in Assurance Cases
Jul 18, 2024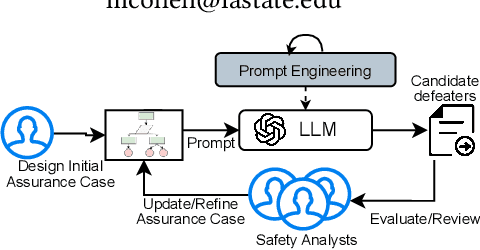



Constructing assurance cases is a widely used, and sometimes required, process toward demonstrating that safety-critical systems will operate safely in their planned environment. To mitigate the risk of errors and missing edge cases, the concept of defeaters - arguments or evidence that challenge claims in an assurance case - has been introduced. Defeaters can provide timely detection of weaknesses in the arguments, prompting further investigation and timely mitigations. However, capturing defeaters relies on expert judgment, experience, and creativity and must be done iteratively due to evolving requirements and regulations. This paper proposes CoDefeater, an automated process to leverage large language models (LLMs) for finding defeaters. Initial results on two systems show that LLMs can efficiently find known and unforeseen feasible defeaters to support safety analysts in enhancing the completeness and confidence of assurance cases.
Towards Engineering Fair and Equitable Software Systems for Managing Low-Altitude Airspace Authorizations
Feb 03, 2024



Small Unmanned Aircraft Systems (sUAS) have gained widespread adoption across a diverse range of applications. This has introduced operational complexities within shared airspaces and an increase in reported incidents, raising safety concerns. In response, the U.S. Federal Aviation Administration (FAA) is developing a UAS Traffic Management (UTM) system to control access to airspace based on an sUAS's predicted ability to safely complete its mission. However, a fully automated system capable of swiftly approving or denying flight requests can be prone to bias and must consider safety, transparency, and fairness to diverse stakeholders. In this paper, we present an initial study that explores stakeholders' perspectives on factors that should be considered in an automated system. Results indicate flight characteristics and environmental conditions were perceived as most important but pilot and drone capabilities should also be considered. Further, several respondents indicated an aversion to any AI-supported automation, highlighting the need for full transparency in automated decision-making. Results provide a societal perspective on the challenges of automating UTM flight authorization decisions and help frame the ongoing design of a solution acceptable to the broader sUAS community.
The Untold Impact of Learning Approaches on Software Fault-Proneness Predictions
Jul 12, 2022



Software fault-proneness prediction is an active research area, with many factors affecting prediction performance extensively studied. However, the impact of the learning approach (i.e., the specifics of the data used for training and the target variable being predicted) on the prediction performance has not been studied, except for one initial work. This paper explores the effects of two learning approaches, useAllPredictAll and usePrePredictPost, on the performance of software fault-proneness prediction, both within-release and across-releases. The empirical results are based on data extracted from 64 releases of twelve open-source projects. Results show that the learning approach has a substantial, and typically unacknowledged, impact on the classification performance. Specifically, using useAllPredictAll leads to significantly better performance than using usePrePredictPost learning approach, both within-release and across-releases. Furthermore, this paper uncovers that, for within-release predictions, this difference in classification performance is due to different levels of class imbalance in the two learning approaches. When class imbalance is addressed, the performance difference between the learning approaches is eliminated. Our findings imply that the learning approach should always be explicitly identified and its impact on software fault-proneness prediction considered. The paper concludes with a discussion of potential consequences of our results for both research and practice.