 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyper Temporal Networks
Mar 22, 2017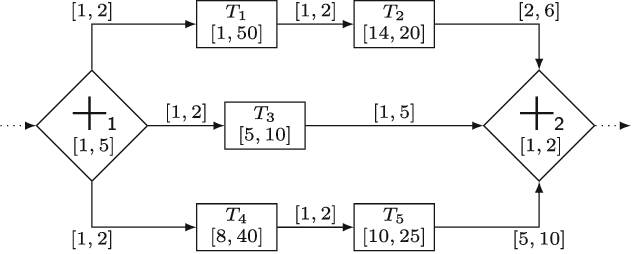
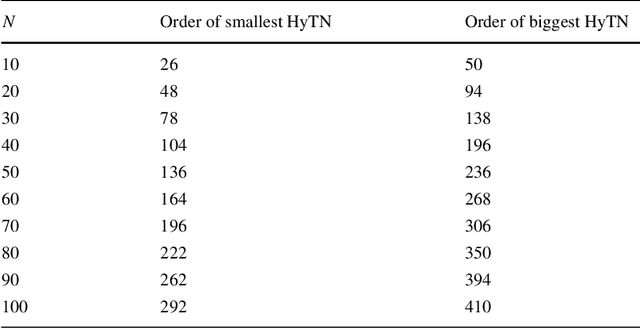

Simple Temporal Networks (STNs) provide a powerful and general tool for representing conjunctions of maximum delay constraints over ordered pairs of temporal variables. In this paper we introduce Hyper Temporal Networks (HyTNs), a strict generalization of STNs, to overcome the limitation of considering only conjunctions of constraints but maintaining a practical efficiency in the consistency check of the instances. In a Hyper Temporal Network a single temporal hyperarc constraint may be defined as a set of two or more maximum delay constraints which is satisfied when at least one of these delay constraints is satisfied. HyTNs are meant as a light generalization of STNs offering an interesting compromise. On one side, there exist practical pseudo-polynomial time algorithms for checking consistency and computing feasible schedules for HyTNs. On the other side, HyTNs offer a more powerful model accommodating natural constraints that cannot be expressed by STNs like Trigger off exactly delta min before (after) the occurrence of the first (last) event in a set., which are used to represent synchronization events in some process aware information systems/workflow models proposed in the literature.
The Dynamic Controllability of Conditional STNs with Uncertainty
Dec 10, 2012


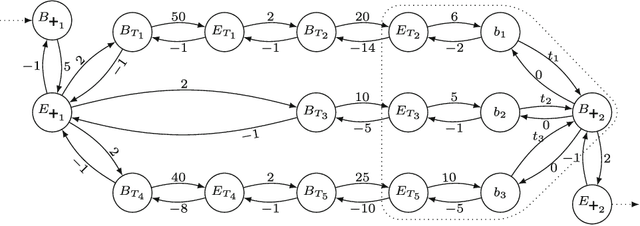
Recent attempts to automate business processes and medical-treatment processes have uncovered the need for a formal framework that can accommodate not only temporal constraints, but also observations and actions with uncontrollable durations. To meet this need, this paper defines a Conditional Simple Temporal Network with Uncertainty (CSTNU) that combines the simple temporal constraints from a Simple Temporal Network (STN) with the conditional nodes from a Conditional Simple Temporal Problem (CSTP) and the contingent links from a Simple Temporal Network with Uncertainty (STNU). A notion of dynamic controllability for a CSTNU is defined that generalizes the dynamic consistency of a CTP and the dynamic controllability of an STNU. The paper also presents some sound constraint-propagation rules for dynamic controllability that are expected to form the backbone of a dynamic-controllability-checking algorithm for CSTNUs.