Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Exploration of Polygons with Holes
Jul 01, 2012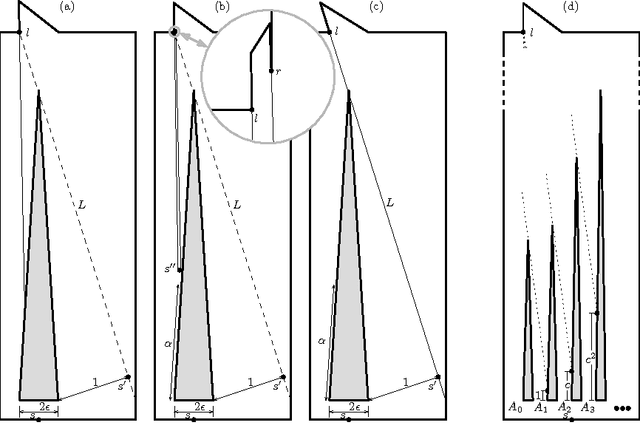
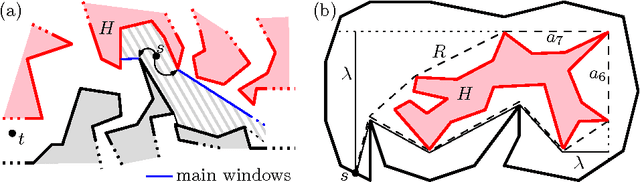
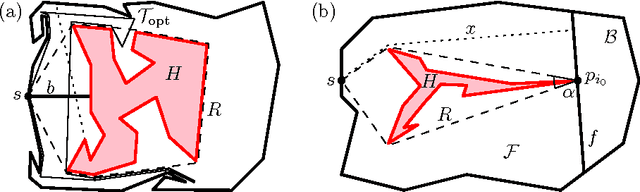
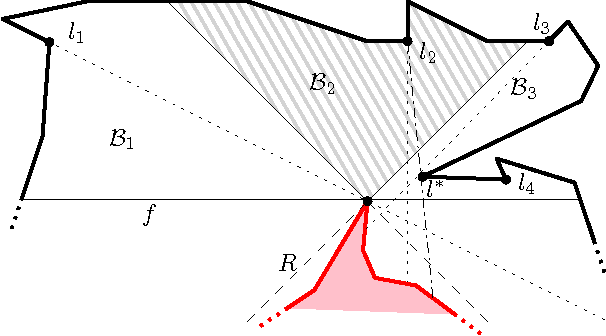
We study online strategies for autonomous mobile robots with vision to explore unknown polygons with at most h holes. Our main contribution is an (h+c_0)!-competitive strategy for such polygons under the assumption that each hole is marked with a special color, where c_0 is a universal constant. The strategy is based on a new hybrid approach. Furthermore, we give a new lower bound construction for small h.
* 16 pages, 9 figures, submitted to WAOA 2012
Via