 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluation of Three Vision Based Object Perception Methods for a Mobile Robot
Feb 02, 2011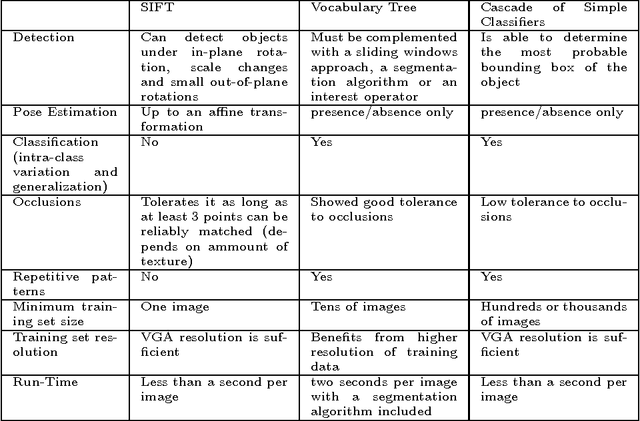

This paper addresses object perception applied to mobile robotics. Being able to perceive semantically meaningful objects in unstructured environments is a key capability in order to make robots suitable to perform high-level tasks in home environments. However, finding a solution for this task is daunting: it requires the ability to handle the variability in image formation in a moving camera with tight time constraints. The paper brings to attention some of the issues with applying three state of the art object recognition and detection methods in a mobile robotics scenario, and proposes methods to deal with windowing/segmentation. Thus, this work aims at evaluating the state-of-the-art in object perception in an attempt to develop a lightweight solution for mobile robotics use/research in typical indoor settings.