 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Computational Approach for Human-like Motion Generation in Upper Limb Exoskeletons Supporting Scapulohumeral Rhythms
Dec 19, 2017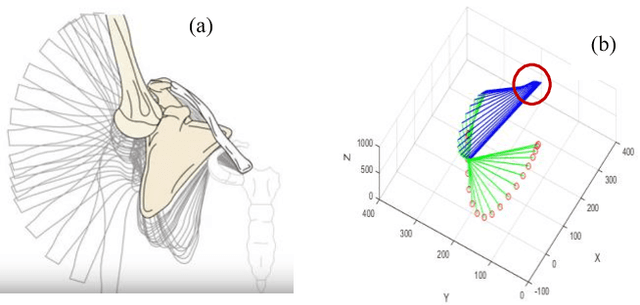
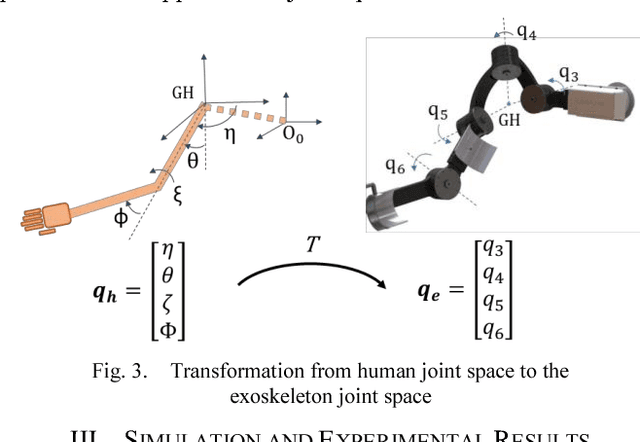
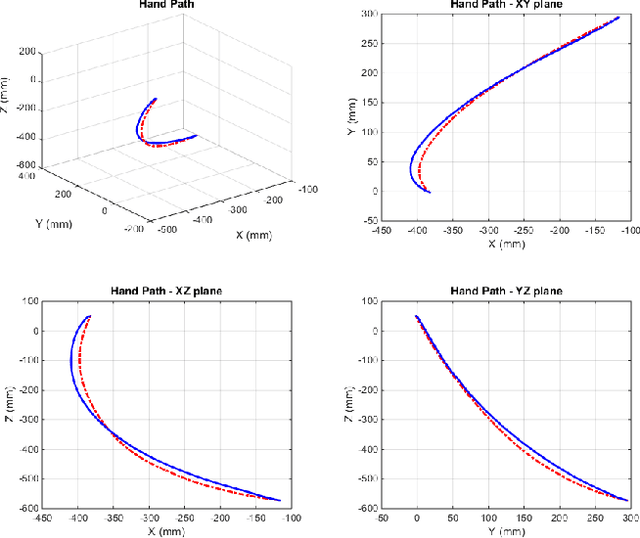
This paper proposes a computational approach for generation of reference path for upper-limb exoskeletons considering the scapulohumeral rhythms of the shoulder. The proposed method can be used in upper-limb exoskeletons with 3 Degrees of Freedom (DoF) in shoulder and 1 DoF in elbow, which are capable of supporting shoulder girdle. The developed computational method is based on Central Nervous System (CNS) governing rules. Existing computational reference generation methods are based on the assumption of fixed shoulder center during motions. This assumption can be considered valid for reaching movements with limited range of motion (RoM). However, most upper limb motions such as Activities of Daily Living (ADL) include large scale inward and outward reaching motions, during which the center of shoulder joint moves significantly. The proposed method generates the reference motion based on a simple model of human arm and a transformation can be used to map the developed motion for other exoskeleton with different kinematics. Comparison of the model outputs with experimental results of healthy subjects performing ADL, show that the proposed model is able to reproduce human-like motions.
Cleverarm: A Novel Exoskeleton For Rehabilitation Of Upper Limb Impairments
Dec 19, 2017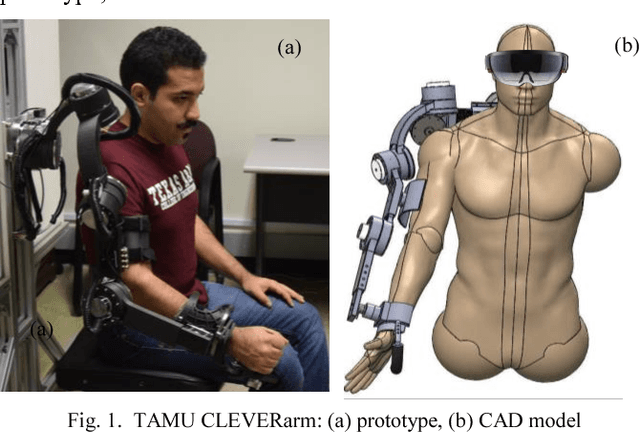

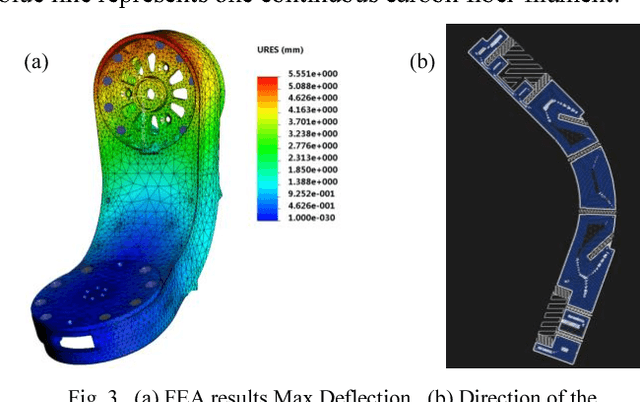

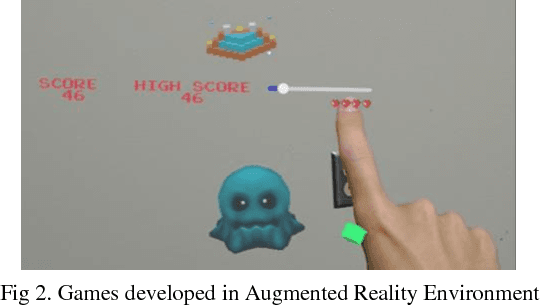
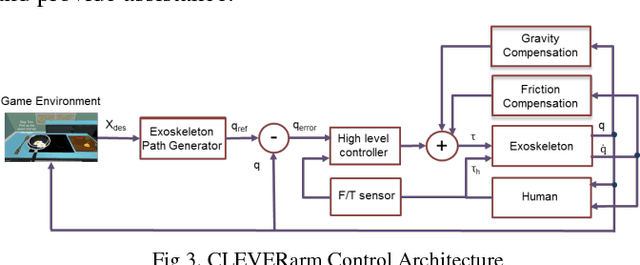
CLEVERarm (Compact, Low-weight, Ergonomic, Virtual and Augmented Reality Enhanced Rehabilitation arm) is a novel exoskeleton with eight degrees of freedom supporting the motion of shoulder girdle, glenohumeral joint, elbow and wrist. Of the eight degrees of freedom of the exoskeleton, six are active and the two degrees of freedom supporting the motion of wrist are passive. This paper briefly outlines the design of CLEVERarm and its control architectures.
Challenges and Opportunities in Exoskeleton-based Rehabilitation
Dec 18, 2017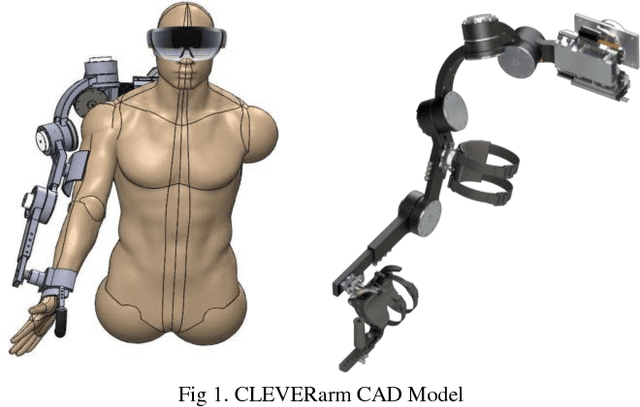
Robotic systems are increasingly used in rehabilitation to provide high intensity training for patients with motor impairment. The results of controlled trials involving human subjects confirm the effectiveness of robot-enhanced methods and prove them to be marginally superior over standard manual therapy in some cases. Although very promising, this line of research is still in its infancy and further studies are required to fully understand the potential benefits of using robotic devices such as exoskeletons. Exoskeletons have been widely studied due to their capability in providing more control over paretic limb as well as the complexities involved in their design and control. This paper briefly discusses the main challenges in development of rehabilitation exoskeletons and elaborates more on how some of these issues are addressed in the design of CLEVERarm, a recently developed upper limb rehabilitation exoskeleton. The paper is concluded with several remarks on the current challenges in wide-spread use of exoskeletons in medical facilities, and a vision for the future of these technologies in rehabilitation medicine.