 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Recognition and Digital Documentation of Cultural Heritage Hemispherical Domes using Images
Jan 25, 2022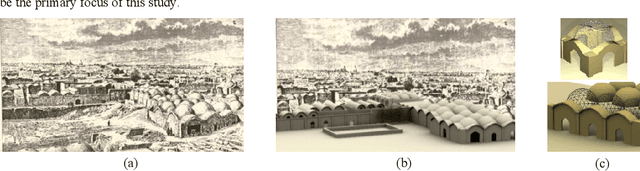
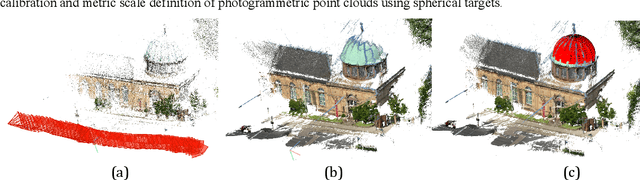

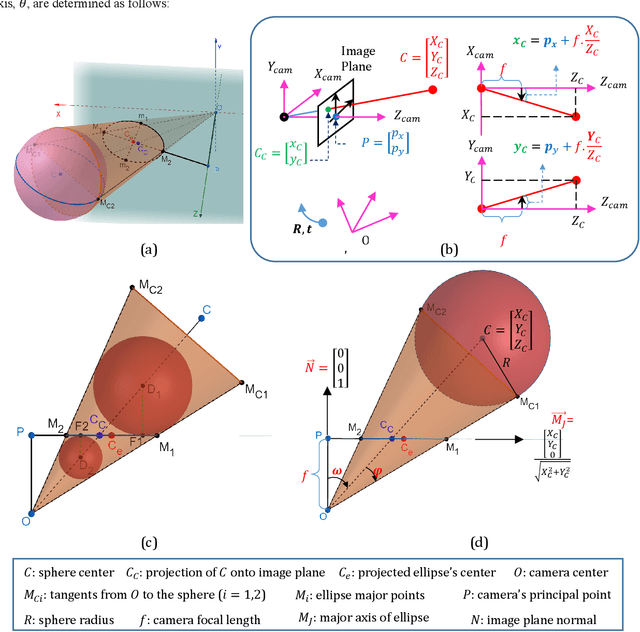
Advancements in optical metrology has enabled documentation of dense 3D point clouds of cultural heritage sites. For large scale and continuous digital documentation, processing of dense 3D point clouds becomes computationally cumbersome, and often requires additional hardware for data management, increasing the time cost, and complexity of projects. To this end, this manuscript presents an original approach to generate fast and reliable semantic digital models of heritage hemispherical domes using only two images. New closed formulations were derived to establish the relationships between spheres and their projected ellipses onto images, which fostered the development of a new automatic framework for as-built generation of spheres. The effectiveness of the proposed method was evaluated under both laboratory and real-world datasets. The results revealed that the proposed method achieved as-built modeling accuracy of around 6mm, while improving the computation time by a factor of 7, when compared to established point cloud processing methods.
Towards Automatic Digital Documentation and Progress Reporting of Mechanical Construction Pipes using Smartphones
Dec 20, 2020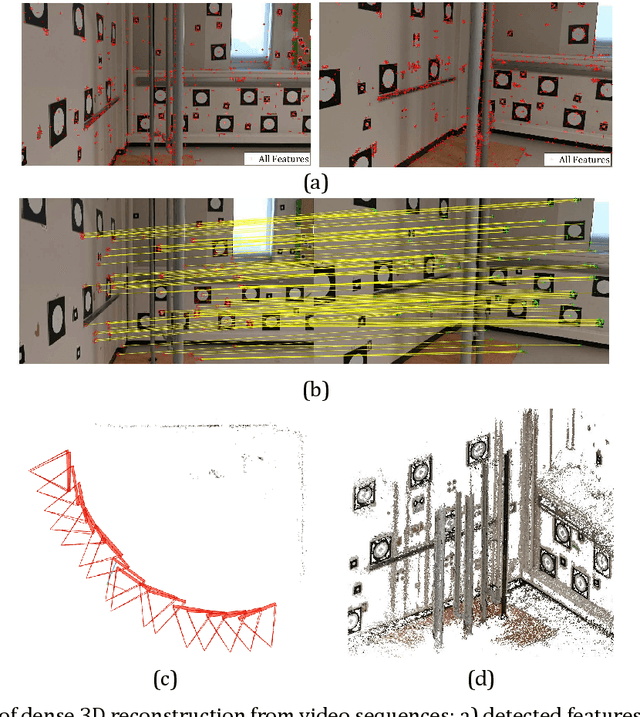
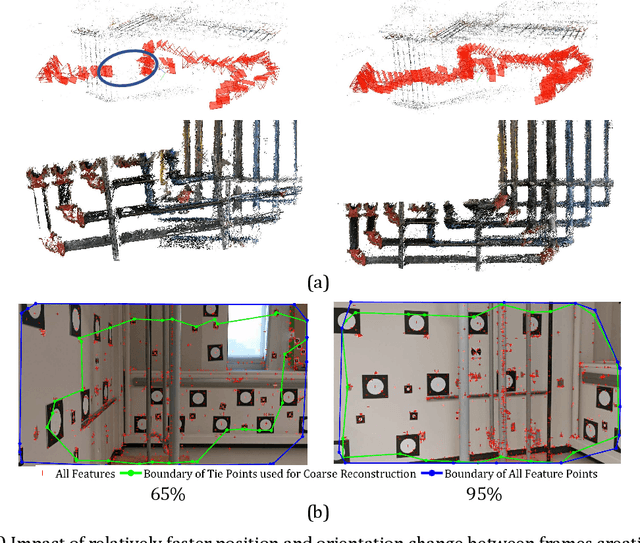
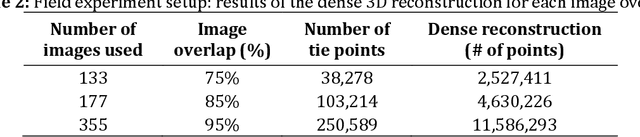
This manuscript presents a framework towards automated 3D digital documentation and progress reporting of mechanical pipes in building construction projects, using smartphones. New methods were proposed to determine the video frame rate required to achieve a desired image overlap; define metric scale for 3D reconstruction; extract pipes from point clouds; and classify pipes according to their planned bill of quantity radii. The effectiveness of the proposed methods in both laboratory (six pipes) and construction site (58 pipes) conditions was evaluated. It was observed that the proposed metric scale definition achieved sub-millimeter pipe radius estimation accuracy. Both laboratory and field experiments revealed that increasing the image overlap improved the pipe classification quality, radius, and length. Overall, using the proposed methods, it was possible to achieve pipe classification F-measure, radius estimation accuracy, and length estimation percent error of 96.4%, 5.4mm, and 5.0%, respectively, on construction sites using at least 95% image overlap.
Robust Detection of Non-overlapping Ellipses from Points with Applications to Circular Target Extraction in Images and Cylinder Detection in Point Clouds
Dec 20, 2020


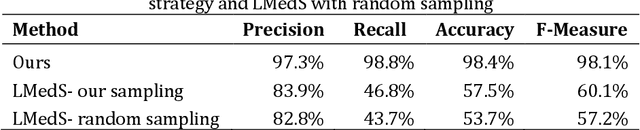
This manuscript provides a collection of new methods for the automated detection of non-overlapping ellipses from edge points. The new methods include a robust Monte Carlo-based approach for detecting points following elliptical patterns from outliers; process to detect non-overlapping ellipses from edge points; and procedure to detect cylinders from three-dimensional point clouds. The proposed methods were thoroughly compared with established state-of-the-art methods, using simulated and real-world datasets, through the design of four sets of original experiments. It was found that the proposed robust ellipse detection was superior to four reliable robust methods, including the popular least median of squares, in both simulated and real-world datasets. The proposed process for detecting non-overlapping ellipses outperformed three established methods, proposed by Fornaciari, Patraucean, and Pangiotakis, in images. The proposed cylinder extraction method identified all detectable mechanical pipes in real-world point clouds. The results of this investigation show promise for the application of the proposed methods for automatic extraction of circular targets from images and pipes from point clouds.
Automated Calibration of Mobile Cameras for 3D Reconstruction of Mechanical Pipes
Dec 04, 2020



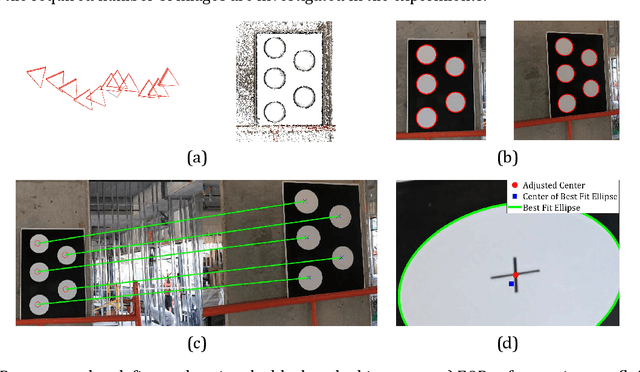
This manuscript provides a new framework for calibration of optical instruments, in particular mobile cameras, using large-scale circular black and white target fields. New methods were introduced for (i) matching targets between images; (ii) adjusting the systematic eccentricity error of target centers; and (iii) iteratively improving the calibration solution through a free-network self-calibrating bundle adjustment. It was observed that the proposed target matching effectively matched circular targets in 270 mobile phone images from a complete calibration laboratory with robustness to Type II errors. The proposed eccentricity adjustment, which requires only camera projective matrices from two views, behaved synonymous to available closed-form solutions, which require several additional object space target information a priori. Finally, specifically for the case of the mobile devices, the calibration parameters obtained using our framework was found superior compared to in-situ calibration for estimating the 3D reconstructed radius of a mechanical pipe (approximately 45% improvement).