 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Detection of Non-overlapping Ellipses from Points with Applications to Circular Target Extraction in Images and Cylinder Detection in Point Clouds
Paper and Code
Dec 20, 2020


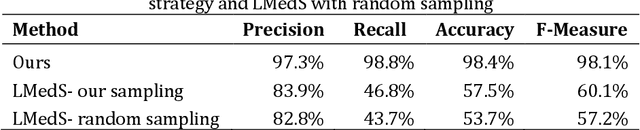
This manuscript provides a collection of new methods for the automated detection of non-overlapping ellipses from edge points. The new methods include a robust Monte Carlo-based approach for detecting points following elliptical patterns from outliers; process to detect non-overlapping ellipses from edge points; and procedure to detect cylinders from three-dimensional point clouds. The proposed methods were thoroughly compared with established state-of-the-art methods, using simulated and real-world datasets, through the design of four sets of original experiments. It was found that the proposed robust ellipse detection was superior to four reliable robust methods, including the popular least median of squares, in both simulated and real-world datasets. The proposed process for detecting non-overlapping ellipses outperformed three established methods, proposed by Fornaciari, Patraucean, and Pangiotakis, in images. The proposed cylinder extraction method identified all detectable mechanical pipes in real-world point clouds. The results of this investigation show promise for the application of the proposed methods for automatic extraction of circular targets from images and pipes from point clouds.