 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Bird Locomotion Kinematics Data for Robotics Modeling
Sep 21, 2008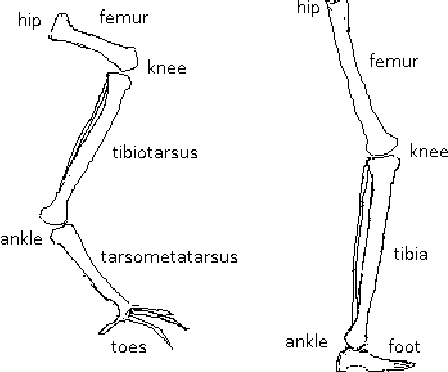
We present here the results of an analysis carried out by biologists and roboticists with the aim of modeling bird locomotion kinematics for robotics purposes. The aim was to develop a bio-inspired kinematic model of the bird leg from biological data. We first acquired and processed kinematic data for sagittal and top views obtained by X-ray radiography of quails walking. Data processing involved filtering and specific data reconstruction in three dimensions, as two-dimensional views cannot be synchronized. We then designed a robotic model of a bird-like leg based on a kinematic analysis of the biological data. Angular velocity vectors were calculated to define the number of degrees of freedom (DOF) at each joint and the orientation of the rotation axes.