Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Heuristic Forward Search for Multi-Agent Systems
Jun 25, 2013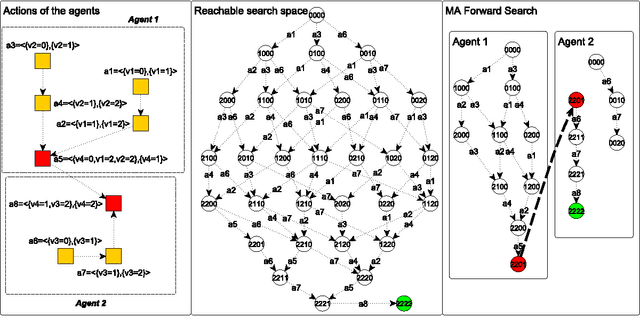

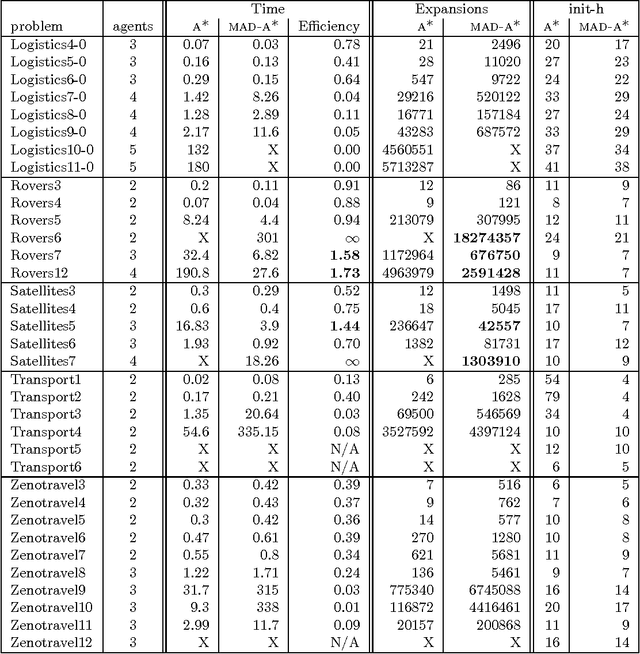
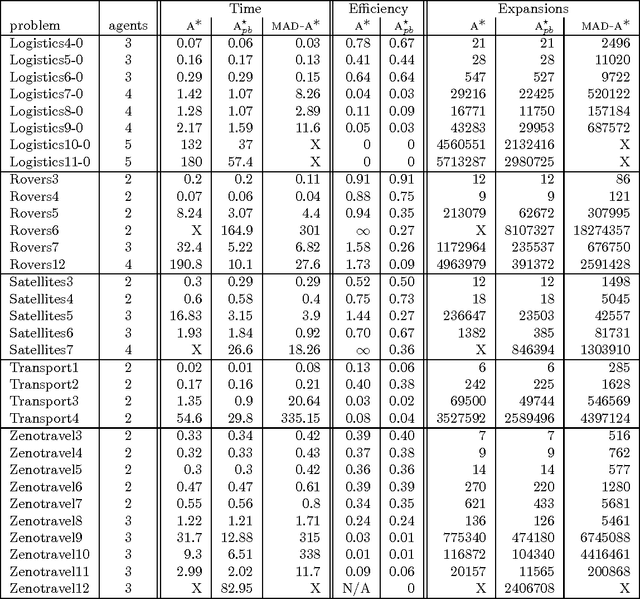
This paper describes a number of distributed forward search algorithms for solving multi-agent planning problems. We introduce a distributed formulation of non-optimal forward search, as well as an optimal version, MAD-A*. Our algorithms exploit the structure of multi-agent problems to not only distribute the work efficiently among different agents, but also to remove symmetries and reduce the overall workload. The algorithms ensure that private information is not shared among agents, yet computation is still efficient -- outperforming current state-of-the-art distributed planners, and in some cases even centralized search -- despite the fact that each agent has access only to partial information.
* 26 pages
Via