 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Bi-Objective Approach to Last-Mile Delivery Routing Considering Driver Preferences
May 25, 2024



The Multi-Objective Vehicle Routing Problem (MOVRP) is a complex optimization problem in the transportation and logistics industry. This paper proposes a novel approach to the MOVRP that aims to create routes that consider drivers' and operators' decisions and preferences. We evaluate two approaches to address this objective: visually attractive route planning and data mining of historical driver behavior to plan similar routes. Using a real-world dataset provided by Amazon, we demonstrate that data mining of historical patterns is more effective than visual attractiveness metrics found in the literature. Furthermore, we propose a bi-objective problem to balance the similarity of routes to historical routes and minimize routing costs. We propose a two-stage GRASP algorithm with heuristic box splitting to solve this problem. The proposed algorithm aims to approximate the Pareto front and to present routes that cover a wide range of the objective function space. The results demonstrate that our approach can generate a small number of non-dominated solutions per instance, which can help decision-makers to identify trade-offs between routing costs and drivers' preferences. Our approach has the potential to enhance the last-mile delivery operations of logistics companies by balancing these conflicting objectives.
A Contrastive Method Based on Elevation Data for Remote Sensing with Scarce and High Level Semantic Labels
Apr 17, 2023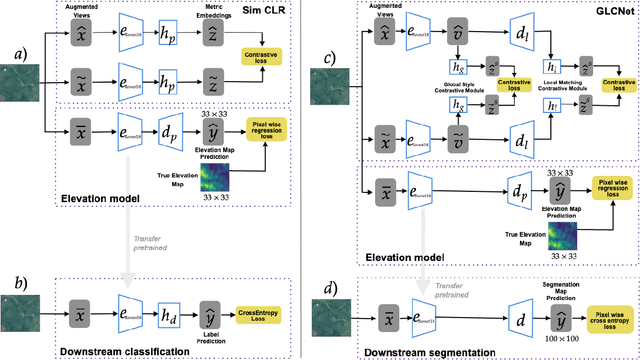



This work proposes a hybrid unsupervised/supervised learning method to pretrain models applied in earth observation downstream tasks where only a handful of labels denoting very general semantic concepts are available. We combine a contrastive approach to pretrain models with a pretext task to predict spatially coarse elevation maps which are commonly available worldwide. The intuition behind is that there is generally some correlation between the elevation and targets in many remote sensing tasks, allowing the model to pre-learn useful representations. We assess the performance of our approach on a segmentation downstream task on labels gathering many possible subclasses (pixel level classification of farmlands vs. other) and an image binary classification task derived from the former, on a dataset on the north-east of Colombia. On both cases we pretrain our models with 39K unlabeled images, fine tune the downstream task only with 80 labeled images and test it with 2944 labeled images. Our experiments show that our methods, GLCNet+Elevation for segmentation and SimCLR+Elevation for classification, outperform their counterparts without the elevation pretext task in terms of accuracy and macro-average F1, which supports the notion that including additional information correlated to targets in downstream tasks can lead to improved performance.