 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAwareness Logic: Kripke Lattices as a Middle Ground between Syntactic and Semantic Models
Jun 24, 2021
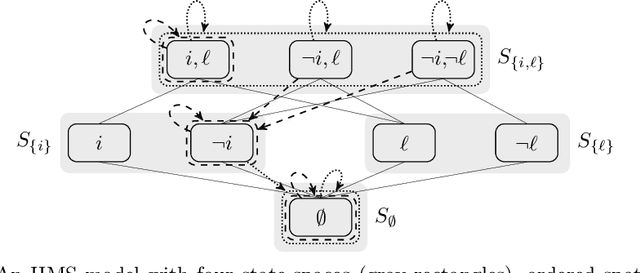


The literature on awareness modeling includes both syntax-free and syntax-based frameworks. Heifetz, Meier \& Schipper (HMS) propose a lattice model of awareness that is syntax-free. While their lattice approach is elegant and intuitive, it precludes the simple option of relying on formal language to induce lattices, and does not explicitly distinguish uncertainty from unawareness. Contra this, the most prominent syntax-based solution, the Fagin-Halpern (FH) model, accounts for this distinction and offers a simple representation of awareness, but lacks the intuitiveness of the lattice structure. Here, we combine these two approaches by providing a lattice of Kripke models, induced by atom subset inclusion, in which uncertainty and unawareness are separate. We show our model equivalent to both HMS and FH models by defining transformations between them which preserve satisfaction of formulas of a language for explicit knowledge, and obtain completeness through our and HMS' results. Lastly, we prove that the Kripke lattice model can be shown equivalent to the FH model (when awareness is propositionally determined) also with respect to the language of the Logic of General Awareness, for which the FH model where originally proposed.
Epistemic Planning with Attention as a Bounded Resource
May 20, 2021

Where information grows abundant, attention becomes a scarce resource. As a result, agents must plan wisely how to allocate their attention in order to achieve epistemic efficiency. Here, we present a framework for multi-agent epistemic planning with attention, based on Dynamic Epistemic Logic (DEL, a powerful formalism for epistemic planning). We identify the framework as a fragment of standard DEL, and consider its plan existence problem. While in the general case undecidable, we show that when attention is required for learning, all instances of the problem are decidable.
Awareness Logic: A Kripke-based Rendition of the Heifetz-Meier-Schipper Model
Dec 23, 2020

Heifetz, Meier and Schipper (HMS) present a lattice model of awareness. The HMS model is syntax-free, which precludes the simple option to rely on formal language to induce lattices, and represents uncertainty and unawareness with one entangled construct, making it difficult to assess the properties of either. Here, we present a model based on a lattice of Kripke models, induced by atom subset inclusion, in which uncertainty and unawareness are separate. We show the models to be equivalent by defining transformations between them which preserve formula satisfaction, and obtain completeness through our and HMS' results.
* 18 pages, 2 figures, proceedings of DaLi conference 2020
Dynamic Term-Modal Logics for Epistemic Planning
Jun 14, 2019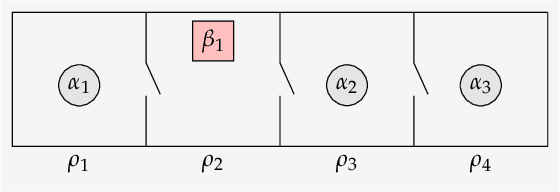



Classical planning frameworks are built on first-order languages. The first-order expressive power is desirable for compactly representing actions via schemas, and for specifying goal formulas such as $\neg\exists x\mathsf{blocks\_door}(x)$. In contrast, several recent epistemic planning frameworks build on propositional modal logic. The modal expressive power is desirable for investigating planning problems with epistemic goals such as $K_{a}\neg\mathsf{problem}$. The present paper presents an epistemic planning framework with first-order expressiveness of classical planning, but extending fully to the epistemic operators. In this framework, e.g. $\exists xK_{x}\exists y\mathsf{blocks\_door}(y)$ is a formula. Logics with this expressive power are called "term-modal" in the literature. This paper presents a rich but well-behaved semantics for term-modal logic. The semantics are given a dynamic extension using first-order "action models" allowing for epistemic planning, and it is shown how corresponding "action schemas" allow for a very compact action representation. Concerning metatheory, the paper defines axiomatic normal term-modal logics, shows a Canonical Model Theorem-like result, present non-standard frame characterization formulas, shows decidability for the finite agent case, and shows a general completeness result for the dynamic extension by reduction axioms.