 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFuSSI-Net: Fusion of Spatio-temporal Skeletons for Intention Prediction Network
May 15, 2020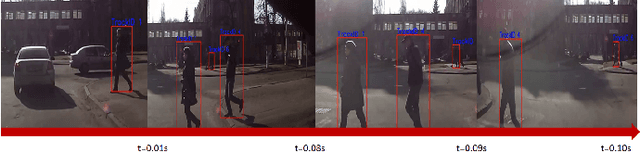


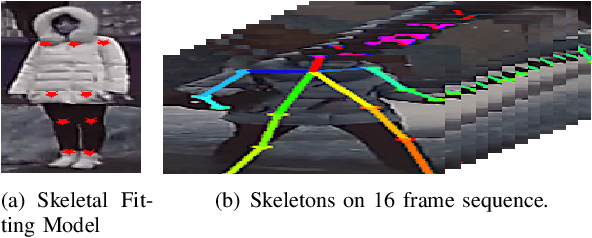
Pedestrian intention recognition is very important to develop robust and safe autonomous driving (AD) and advanced driver assistance systems (ADAS) functionalities for urban driving. In this work, we develop an end-to-end pedestrian intention framework that performs well on day- and night- time scenarios. Our framework relies on objection detection bounding boxes combined with skeletal features of human pose. We study early, late, and combined (early and late) fusion mechanisms to exploit the skeletal features and reduce false positives as well to improve the intention prediction performance. The early fusion mechanism results in AP of 0.89 and precision/recall of 0.79/0.89 for pedestrian intention classification. Furthermore, we propose three new metrics to properly evaluate the pedestrian intention systems. Under these new evaluation metrics for the intention prediction, the proposed end-to-end network offers accurate pedestrian intention up to half a second ahead of the actual risky maneuver.