 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Performance Increment Strategy for Semantic Segmentation of Low-Resolution Images from Damaged Roads
Nov 25, 2024



Autonomous driving needs good roads, but 85% of Brazilian roads have damages that deep learning models may not regard as most semantic segmentation datasets for autonomous driving are high-resolution images of well-maintained urban roads. A representative dataset for emerging countries consists of low-resolution images of poorly maintained roads and includes labels of damage classes; in this scenario, three challenges arise: objects with few pixels, objects with undefined shapes, and highly underrepresented classes. To tackle these challenges, this work proposes the Performance Increment Strategy for Semantic Segmentation (PISSS) as a methodology of 14 training experiments to boost performance. With PISSS, we reached state-of-the-art results of 79.8 and 68.8 mIoU on the Road Traversing Knowledge (RTK) and Technik Autonomer Systeme 500 (TAS500) test sets, respectively. Furthermore, we also offer an analysis of DeepLabV3+ pitfalls for small object segmentation.
Face Reconstruction with Variational Autoencoder and Face Masks
Dec 03, 2021
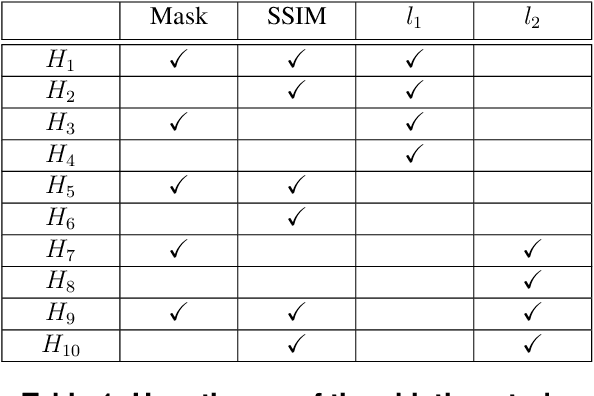


Variational AutoEncoders (VAE) employ deep learning models to learn a continuous latent z-space that is subjacent to a high-dimensional observed dataset. With that, many tasks are made possible, including face reconstruction and face synthesis. In this work, we investigated how face masks can help the training of VAEs for face reconstruction, by restricting the learning to the pixels selected by the face mask. An evaluation of the proposal using the celebA dataset shows that the reconstructed images are enhanced with the face masks, especially when SSIM loss is used either with l1 or l2 loss functions. We noticed that the inclusion of a decoder for face mask prediction in the architecture affected the performance for l1 or l2 loss functions, while this was not the case for the SSIM loss. Besides, SSIM perceptual loss yielded the crispest samples between all hypotheses tested, although it shifts the original color of the image, making the usage of the l1 or l2 losses together with SSIM helpful to solve this issue.