 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unifying Framework for Formal Theories of Novelty:Framework, Examples and Discussion
Dec 08, 2020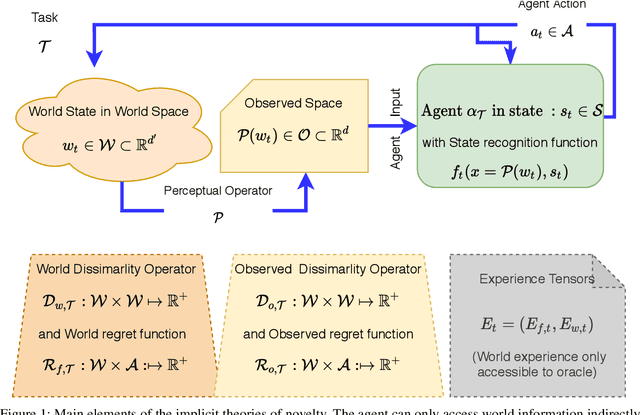


Managing inputs that are novel, unknown, or out-of-distribution is critical as an agent moves from the lab to the open world. Novelty-related problems include being tolerant to novel perturbations of the normal input, detecting when the input includes novel items, and adapting to novel inputs. While significant research has been undertaken in these areas, a noticeable gap exists in the lack of a formalized definition of novelty that transcends problem domains. As a team of researchers spanning multiple research groups and different domains, we have seen, first hand, the difficulties that arise from ill-specified novelty problems, as well as inconsistent definitions and terminology. Therefore, we present the first unified framework for formal theories of novelty and use the framework to formally define a family of novelty types. Our framework can be applied across a wide range of domains, from symbolic AI to reinforcement learning, and beyond to open world image recognition. Thus, it can be used to help kick-start new research efforts and accelerate ongoing work on these important novelty-related problems. This extended version of our AAAI 2021 paper included more details and examples in multiple domains.
PHA*: Finding the Shortest Path with A* in An Unknown Physical Environment
Jun 30, 2011



We address the problem of finding the shortest path between two points in an unknown real physical environment, where a traveling agent must move around in the environment to explore unknown territory. We introduce the Physical-A* algorithm (PHA*) for solving this problem. PHA* expands all the mandatory nodes that A* would expand and returns the shortest path between the two points. However, due to the physical nature of the problem, the complexity of the algorithm is measured by the traveling effort of the moving agent and not by the number of generated nodes, as in standard A*. PHA* is presented as a two-level algorithm, such that its high level, A*, chooses the next node to be expanded and its low level directs the agent to that node in order to explore it. We present a number of variations for both the high-level and low-level procedures and evaluate their performance theoretically and experimentally. We show that the travel cost of our best variation is fairly close to the optimal travel cost, assuming that the mandatory nodes of A* are known in advance. We then generalize our algorithm to the multi-agent case, where a number of cooperative agents are designed to solve the problem. Specifically, we provide an experimental implementation for such a system. It should be noted that the problem addressed here is not a navigation problem, but rather a problem of finding the shortest path between two points for future usage.