 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA rasterized ray-tracer pipeline for real-time, multi-device sonar simulation
Jan 08, 2020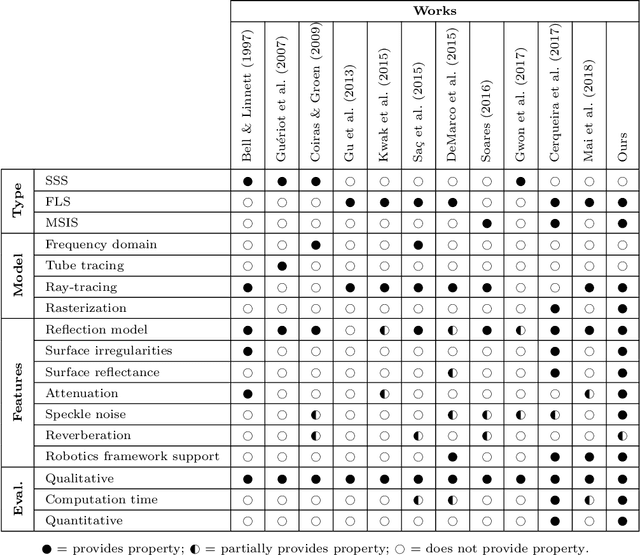

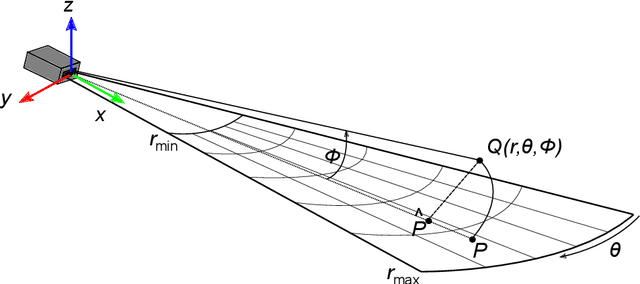
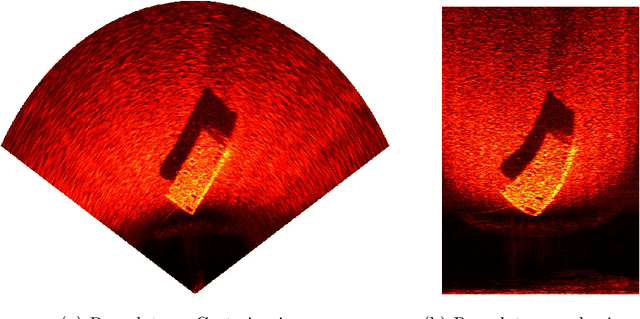
Simulating sonar devices requires modeling complex underwater acoustics, simultaneously rendering time-efficient data. Existing methods focus on basic implementation of one sonar type, where most of sound properties are disregarded. In this context, this work presents a multi-device sonar simulator capable of processing an underwater scene by a hybrid pipeline on GPU: Rasterization computes the primary intersections, while only the reflective areas are ray-traced. Our proposed system launches few rays when compared to a full ray-tracing based method, achieving a significant performance gain without quality loss in the final rendering. Resulting reflections are then characterized as two sonar parameters: Echo intensity and pulse distance. Underwater acoustic features, such as speckle noise, transmission loss, reverberation and material properties of observable objects are also computed in the final generated acoustic image. Visual and numerical performance assessments demonstrated the effectiveness of the proposed simulator to render underwater scenes in comparison to real-world sonar devices.
Rotation-invariant shipwreck recognition with forward-looking sonar
Oct 11, 2019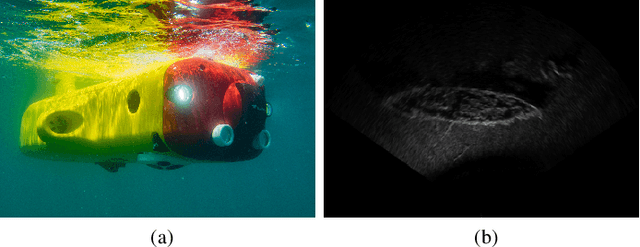


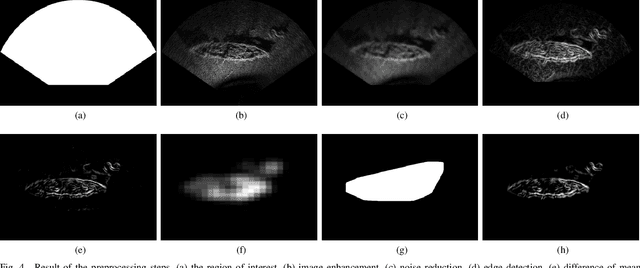
Under the sea, visible spectrum cameras have limited sensing capacity, being able to detect objects only in clear water, but in a constrained range. Considering any sea water condition, sonars are more suitable to support autonomous underwater vehicles' navigation, even in turbid condition. Despite that sonar suitability, this type of sensor does not provide high-density information, such as optical sensors, making the process of object recognition to be more complex. To deal with that problem, we propose a novel trainable method to detect and recognize (identify) specific target objects under the sea with a forward-looking sonar. Our method has a preprocessing step in charge of strongly reducing the sensor noise and seabed background. To represent the object, our proposed method uses histogram of orientation gradient (HOG) as feature extractor. HOG ultimately feed a multi-scale oriented detector combined with a support vector machine to recognize specific trained objects in a rotation-invariant way. Performance assessment demonstrated promising results, favoring the method to be applied in underwater remote sensing.