 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Visual Servoing Tracking Control of Uncalibrated Robotic Systems for Dynamic Dwarf Culture Orchards Harvest
Nov 03, 2020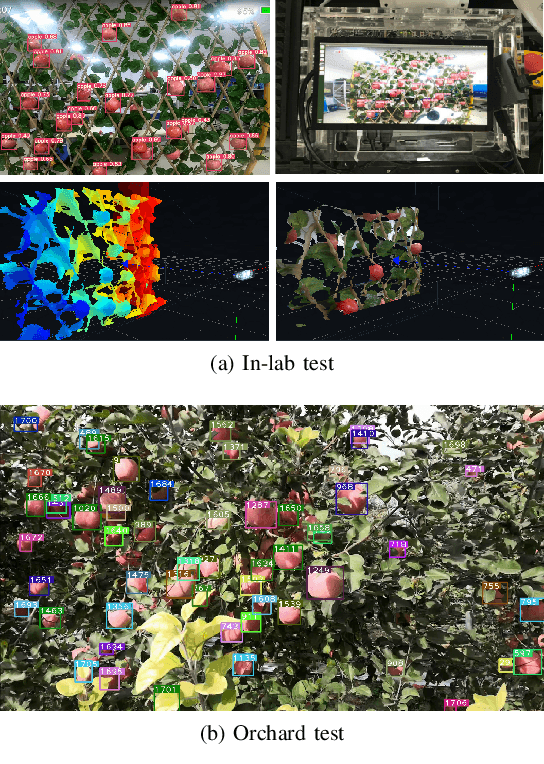
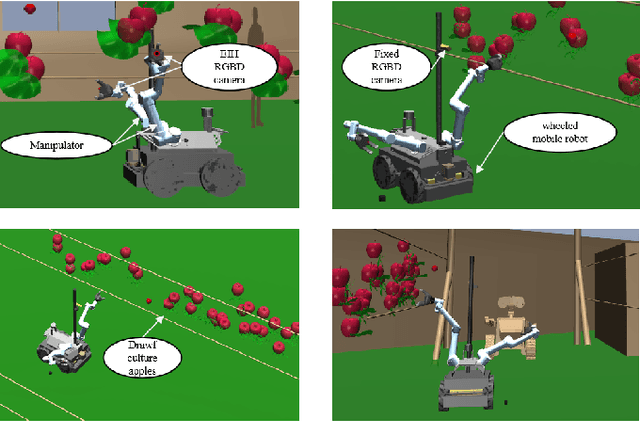
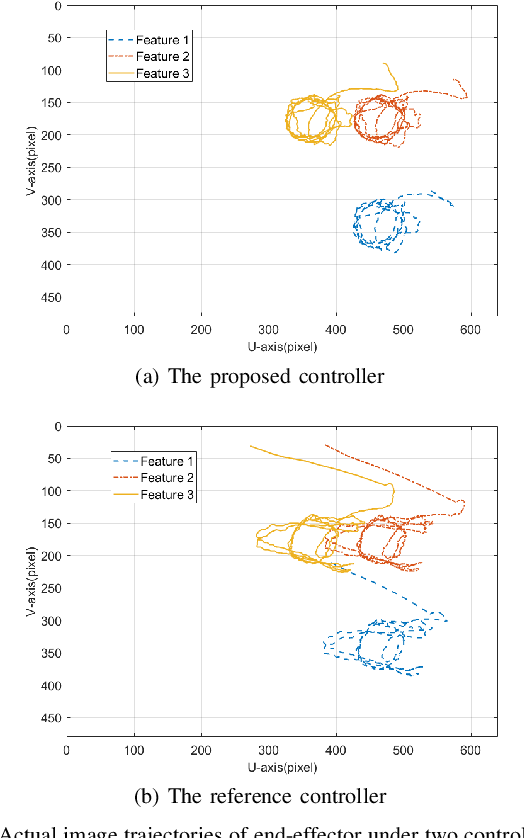
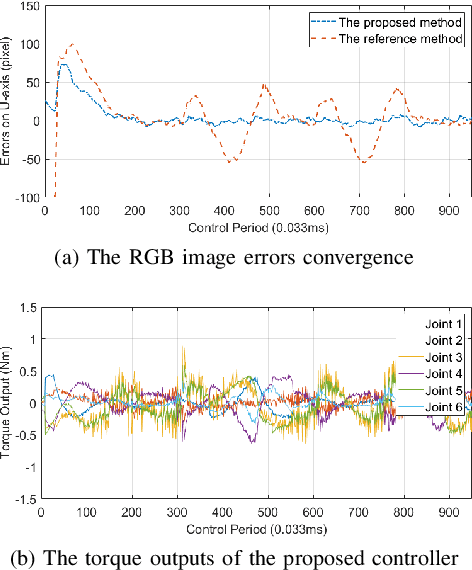
The paper is concerned with the dynamic tracking problem of SNAP orchards harvesting robots in the presence of multiple uncalibrated model parameters in the application of dwarf culture orchards harvest. A new hybrid visual servoing adaptive tracking controller and three adaptive laws are proposed to guarantee harvesting robots to finish the dynamic harvesting task and the adaption to unknown parameters including camera intrinsic and extrinsic model and robot dynamics. By the Lyapunov theory, asymptotic convergence of the closed-loop system with the proposed control scheme is rigorously proven. Experimental and simulation results have been conducted to verify the performance of the proposed control scheme. The results demonstrate its effectiveness and superiority.
Depth Ranging Performance Evaluation and Improvement for RGB-D Cameras on Field-Based High-Throughput Phenotyping Robots
Nov 02, 2020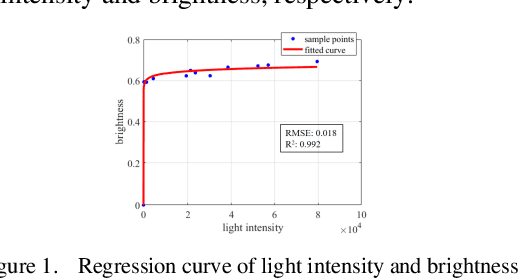


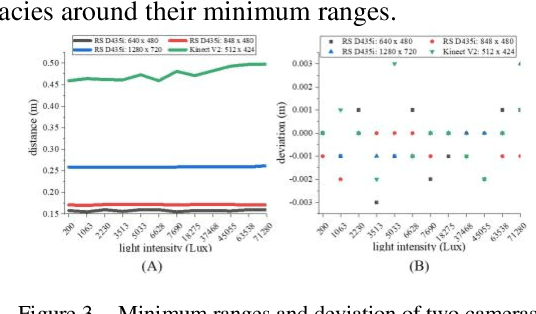
RGB-D cameras have been successfully used for indoor High-ThroughpuT Phenotyping (HTTP). However, their capability and feasibility for in-field HTTP still need to be evaluated, due to the noise and disturbances generated by unstable illumination, specular reflection, and diffuse reflection, etc. To solve these problems, we evaluated the depth-ranging performances of two consumer-level RGB-D cameras (RealSense D435i and Kinect V2) under in-field HTTP scenarios, and proposed a strategy to compensate the depth measurement error. For performance evaluation, we focused on determining their optimal ranging areas for different crop organs. Based on the evaluation results, we proposed a brightness-and-distance-based Support Vector Regression Strategy, to compensate the ranging error. Furthermore, we analyzed the depth filling rate of two RGB-D cameras under different lighting intensities. Experimental results showed that: 1) For RealSense D435i, its effective ranging area is [0.160, 1.400] m, and in-field filling rate is approximately 90%. 2) For Kinect V2, it has a high ranging accuracy in the [0.497, 1.200] m, but its in-field filling rate is less than 24.9%. 3) Our error compensation model can effectively reduce the influences of lighting intensity and target distance. The maximum MSE and minimum R2 of this model are 0.029 and 0.867, respectively. To sum up, RealSense D435i has better ranging performances than Kinect V2 on in-field HTTP.