 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Explainable Two Stage Deep Learning Framework for Pericoronitis Assessment in Panoramic Radiographs Using YOLOv8 and ResNet-50
Jan 13, 2026Objectives: To overcome challenges in diagnosing pericoronitis on panoramic radiographs, an AI-assisted assessment system integrating anatomical localization, pathological classification, and interpretability. Methods: A two-stage deep learning pipeline was implemented. The first stage used YOLOv8 to detect third molars and classify their anatomical positions and angulations based on Winter's classification. Detected regions were then fed into a second-stage classifier, a modified ResNet-50 architecture, for detecting radiographic features suggestive of pericoronitis. To enhance clinical trust, Grad-CAM was used to highlight key diagnostic regions on the radiographs. Results: The YOLOv8 component achieved 92% precision and 92.5% mean average precision. The ResNet-50 classifier yielded F1-scores of 88% for normal cases and 86% for pericoronitis. Radiologists reported 84% alignment between Grad-CAM and their diagnostic impressions, supporting the radiographic relevance of the interpretability output. Conclusion: The system shows strong potential for AI-assisted panoramic assessment, with explainable AI features that support clinical confidence.
Modified RRT* for Path Planning in Autonomous Driving
Feb 19, 2024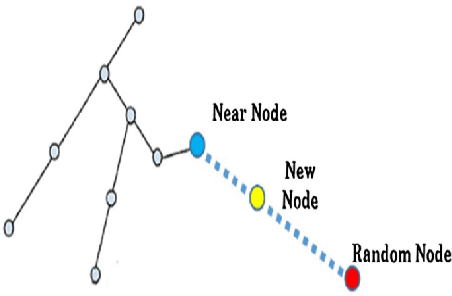
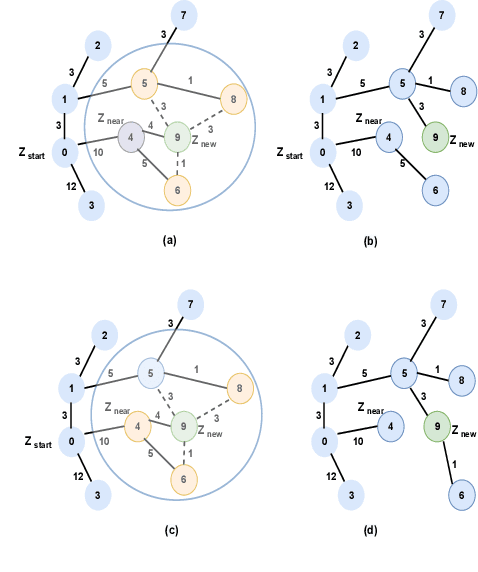
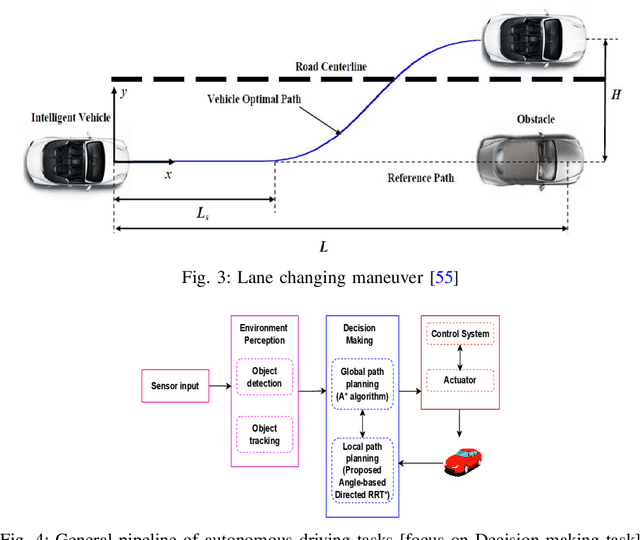
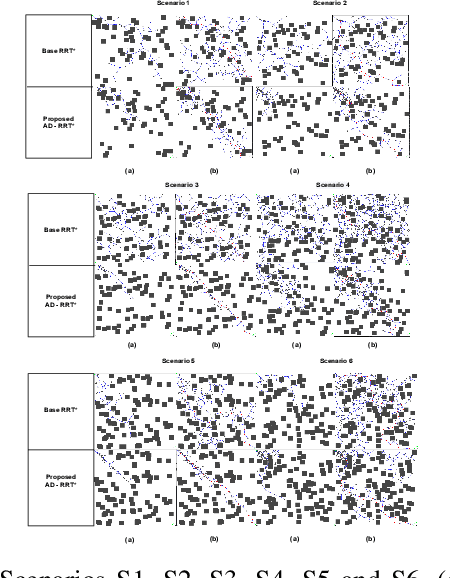
Essential tasks in autonomous driving includes environment perception, detection and tracking, path planning and action control. This paper focus on path planning, which is one of the challenging task as it needs to find optimal path in highly complex and dynamic environments. Usually, a driving scenario has large number of obstacles in their route. In this paper, we propose a two-stage path planning algorithm named Angle-based Directed Rapidly exploring Random Trees (AD-RRT*) to address the problem of optimal path in complex environment. The proposed algorithm uses A* algorithm for global path planning and modifies RRT* to bound the samples using angle. The efficiency of the proposed algorithm is evaluated through experiments in different scenarios based on the location and number of obstacles. The proposed algorithm showed higher rate of convergence with reduced time and less number of nodes than the base RRT* algorithm.