 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimation and Prediction of Deterministic Human Intent Signal to augment Haptic Glove aided Control of Robotic Hand
Oct 15, 2021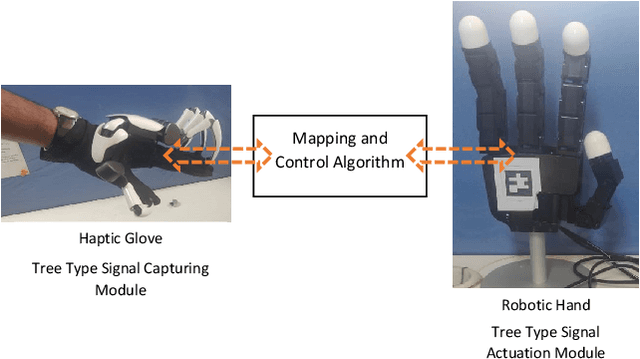
The paper focuses on Haptic Glove (HG) based control of a Robotic Hand (RH) executing in-hand manipulation. A control algorithm is presented to allow the RH relocate the object held to a goal pose. The motion signals for both the HG and the RH are high dimensional. The RH kinematics is usually different from the HG kinematics. The variability of kinematics of the two devices, added with the incomplete information about the human hand kinematics result in difficulty in direct mapping of the high dimensional motion signal of the HG to the RH. Hence, a method is proposed to estimate the human intent from the high dimensional HG motion signal and reconstruct the signal at the RH to ensure object relocation. It is also shown that the lag in synthesis of the motion signal of the human hand added with the control latency of the RH leads to a requirement of the prediction of the human intent signal. Then, a recurrent neural network (RNN) is proposed to predict the human intent signal ahead of time.