 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnabling a Social Robot to Process Social Cues to Detect when to Help a User
Oct 18, 2021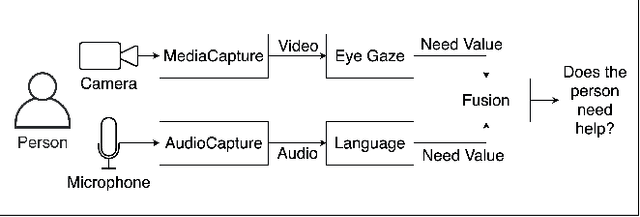

It is important for socially assistive robots to be able to recognize when a user needs and wants help. Such robots need to be able to recognize human needs in a real-time manner so that they can provide timely assistance. We propose an architecture that uses social cues to determine when a robot should provide assistance. Based on a multimodal fusion approach upon eye gaze and language modalities, our architecture is trained and evaluated on data collected in a robot-assisted Lego building task. By focusing on social cues, our architecture has minimal dependencies on the specifics of a given task, enabling it to be applied in many different contexts. Enabling a social robot to recognize a user's needs through social cues can help it to adapt to user behaviors and preferences, which in turn will lead to improved user experiences.