 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision-Free Navigation using Evolutionary Symmetrical Neural Networks
Apr 11, 2022
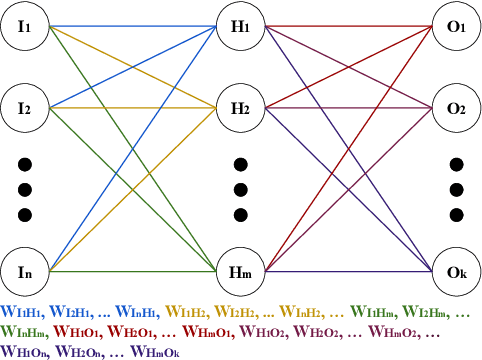


Collision avoidance systems play a vital role in reducing the number of vehicle accidents and saving human lives. This paper extends the previous work using evolutionary neural networks for reactive collision avoidance. We are proposing a new method we have called symmetric neural networks. The method improves the model's performance by enforcing constraints between the network weights which reduces the model optimization search space and hence, learns more accurate control of the vehicle steering for improved maneuvering. The training and validation processes are carried out using a simulation environment - the codebase is publicly available. Extensive experiments are conducted to analyze the proposed method and evaluate its performance. The method is tested in several simulated driving scenarios. In addition, we have analyzed the effect of the rangefinder sensor resolution and noise on the overall goal of reactive collision avoidance. Finally, we have tested the generalization of the proposed method. The results are encouraging; the proposed method has improved the model's learning curve for training scenarios and generalization to the new test scenarios. Using constrained weights has significantly improved the number of generations required for the Genetic Algorithm optimization.
* arXiv admin note: text overlap with arXiv:1609.08414