 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive learning for structural reliability analysis with multiple limit state functions through variance-enhanced PC-Kriging surrogate models
Feb 23, 2023Existing active strategies for training surrogate models yield accurate structural reliability estimates by aiming at design space regions in the vicinity of a specified limit state function. In many practical engineering applications, various damage conditions, e.g. repair, failure, should be probabilistically characterized, thus demanding the estimation of multiple performance functions. In this work, we investigate the capability of active learning approaches for efficiently selecting training samples under a limited computational budget while still preserving the accuracy associated with multiple surrogated limit states. Specifically, PC-Kriging-based surrogate models are actively trained considering a variance correction derived from leave-one-out cross-validation error information, whereas the sequential learning scheme relies on U-function-derived metrics. The proposed active learning approaches are tested in a highly nonlinear structural reliability setting, whereas in a more practical application, failure and repair events are stochastically predicted in the aftermath of a ship collision against an offshore wind substructure. The results show that a balanced computational budget administration can be effectively achieved by successively targeting the specified multiple limit state functions within a unified active learning scheme.
Optimal Inspection and Maintenance Planning for Deteriorating Structures through Dynamic Bayesian Networks and Markov Decision Processes
Sep 09, 2020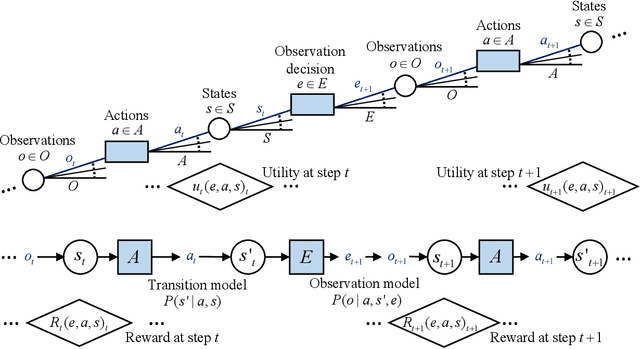

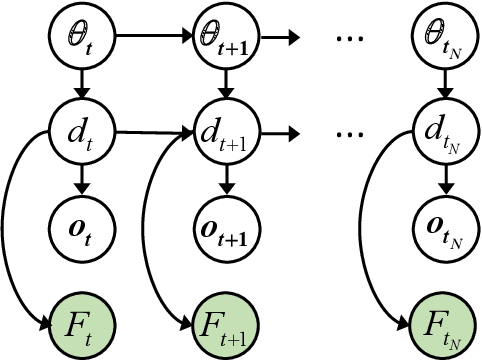

Civil and maritime engineering systems, among others, from bridges to offshore platforms and wind turbines, must be efficiently managed as they are exposed to deterioration mechanisms throughout their operational life, such as fatigue or corrosion. Identifying optimal inspection and maintenance policies demands the solution of a complex sequential decision-making problem under uncertainty, with the main objective of efficiently controlling the risk associated with structural failures. Addressing this complexity, risk-based inspection planning methodologies, supported often by dynamic Bayesian networks, evaluate a set of pre-defined heuristic decision rules to reasonably simplify the decision problem. However, the resulting policies may be compromised by the limited space considered in the definition of the decision rules. Avoiding this limitation, Partially Observable Markov Decision Processes (POMDPs) provide a principled mathematical methodology for stochastic optimal control under uncertain action outcomes and observations, in which the optimal actions are prescribed as a function of the entire, dynamically updated, state probability distribution. In this paper, we combine dynamic Bayesian networks with POMDPs in a joint framework for optimal inspection and maintenance planning, and we provide the formulation for developing both infinite and finite horizon POMDPs in a structural reliability context. The proposed methodology is implemented and tested for the case of a structural component subject to fatigue deterioration, demonstrating the capability of state-of-the-art point-based POMDP solvers for solving the underlying planning optimization problem. Within the numerical experiments, POMDP and heuristic-based policies are thoroughly compared, and results showcase that POMDPs achieve substantially lower costs as compared to their counterparts, even for traditional problem settings.