 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Genetic Approach to Gradient-Free Kinodynamic Planning in Uneven Terrains
Apr 17, 2025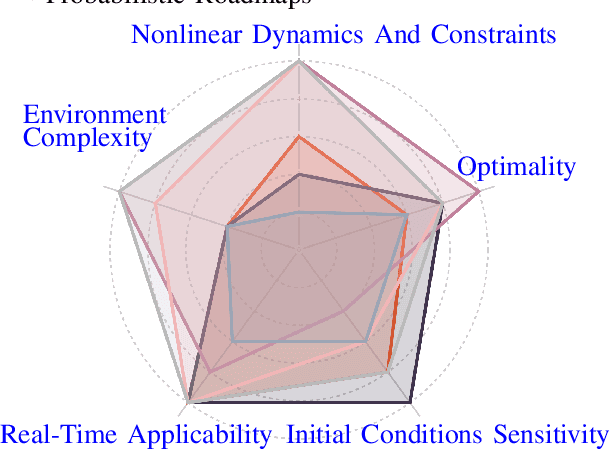
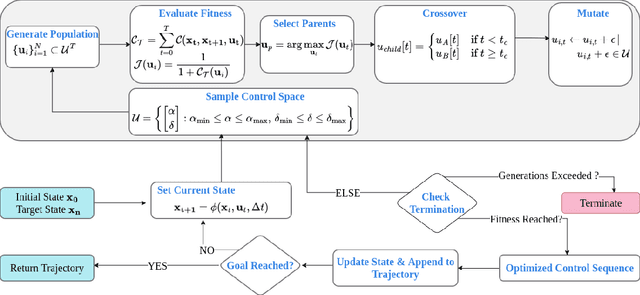
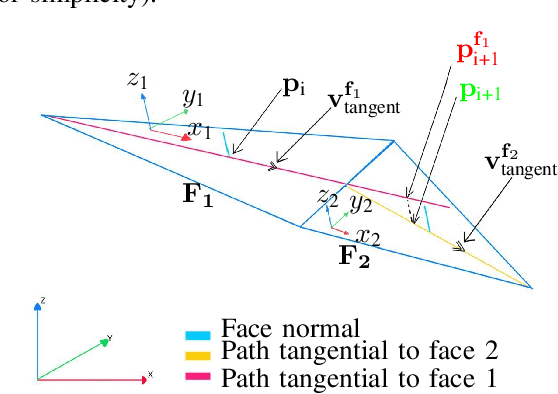
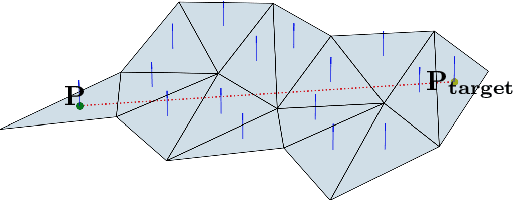
This paper proposes a genetic algorithm-based kinodynamic planning algorithm (GAKD) for car-like vehicles navigating uneven terrains modeled as triangular meshes. The algorithm's distinct feature is trajectory optimization over a fixed-length receding horizon using a genetic algorithm with heuristic-based mutation, ensuring the vehicle's controls remain within its valid operational range. By addressing challenges posed by uneven terrain meshes, such as changing face normals, GAKD offers a practical solution for path planning in complex environments. Comparative evaluations against Model Predictive Path Integral (MPPI) and log-MPPI methods show that GAKD achieves up to 20 percent improvement in traversability cost while maintaining comparable path length. These results demonstrate GAKD's potential in improving vehicle navigation on challenging terrains.