 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimizing The Maximum Distance Traveled To Form Patterns With Systems of Mobile Robots
Jun 28, 2020



In the pattern formation problem, robots in a system must self-coordinate to form a given pattern, regardless of translation, rotation, uniform-scaling, and/or reflection. In other words, a valid final configuration of the system is a formation that is \textit{similar} to the desired pattern. While there has been no shortage of research in the pattern formation problem under a variety of assumptions, models, and contexts, we consider the additional constraint that the maximum distance traveled among all robots in the system is minimum. Existing work in pattern formation and closely related problems are typically application-specific or not concerned with optimality (but rather feasibility). We show the necessary conditions any optimal solution must satisfy and present a solution for systems of three robots. Our work also led to an interesting result that has applications beyond pattern formation. Namely, a metric for comparing two triangles where a distance of $0$ indicates the triangles are similar, and $1$ indicates they are \emph{fully dissimilar}.
Synchronous Robotic Framework
Jun 08, 2020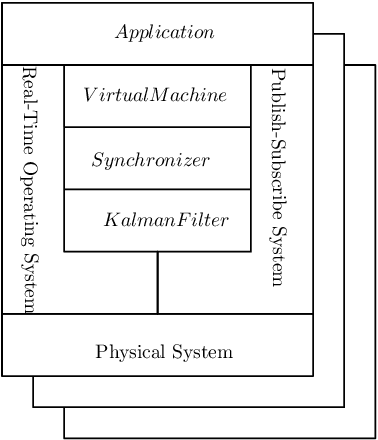

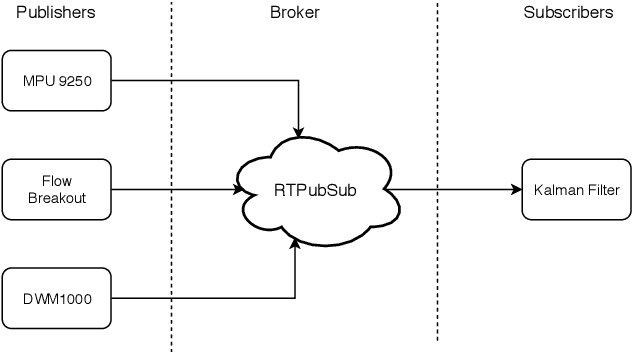

We present a synchronous robotic testbed called SyROF that allows fast implementation of robotic swarms. Our main goal is to lower the entry barriers to cooperative-robot systems for undergraduate and graduate students. The testbed provides a high-level programming environment that allows the implementation of Timed Input/Output Automata (TIOA). SyROF offers the following unique characteristics: 1) a transparent mechanism to synchronize robot maneuvers, 2) a membership service with a failure detector, and 3) a transparent service to provide common knowledge in every round. These characteristics are fundamental to simplifying the implementation of robotic swarms. The software is organized in five layers: The lower layer consists of a real-time publish-subscribe system that allows efficient communication between tasks. The next layer is an implementation of a Kalman filter to estimate the position, orientation, and speed of the robot. The third layer consists of a synchronizer that synchronously executes the robot maneuvers, provides common knowledge to all the active participants, and handles failures. The fifth layer consists of the programming environment.