 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapturing a Moving Target by Two Robots in the F2F Model
Mar 19, 2025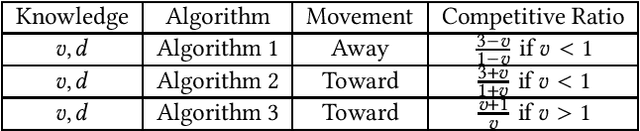
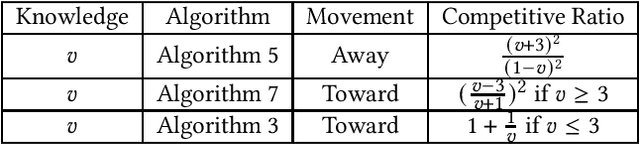


We study a search problem on capturing a moving target on an infinite real line. Two autonomous mobile robots (which can move with a maximum speed of 1) are initially placed at the origin, while an oblivious moving target is initially placed at a distance $d$ away from the origin. The robots can move along the line in any direction, but the target is oblivious, cannot change direction, and moves either away from or toward the origin at a constant speed $v$. Our aim is to design efficient algorithms for the two robots to capture the target. The target is captured only when both robots are co-located with it. The robots communicate with each other only face-to-face (F2F), meaning they can exchange information only when co-located, while the target remains oblivious and has no communication capabilities. We design algorithms under various knowledge scenarios, which take into account the prior knowledge the robots have about the starting distance $d$, the direction of movement (either toward or away from the origin), and the speed $v$ of the target. As a measure of the efficiency of the algorithms, we use the competitive ratio, which is the ratio of the capture time of an algorithm with limited knowledge to the capture time in the full-knowledge model. In our analysis, we are mindful of the cost of changing direction of movement, and show how to accomplish the capture of the target with at most three direction changes (turns).
Minimizing The Maximum Distance Traveled To Form Patterns With Systems of Mobile Robots
Jun 28, 2020



In the pattern formation problem, robots in a system must self-coordinate to form a given pattern, regardless of translation, rotation, uniform-scaling, and/or reflection. In other words, a valid final configuration of the system is a formation that is \textit{similar} to the desired pattern. While there has been no shortage of research in the pattern formation problem under a variety of assumptions, models, and contexts, we consider the additional constraint that the maximum distance traveled among all robots in the system is minimum. Existing work in pattern formation and closely related problems are typically application-specific or not concerned with optimality (but rather feasibility). We show the necessary conditions any optimal solution must satisfy and present a solution for systems of three robots. Our work also led to an interesting result that has applications beyond pattern formation. Namely, a metric for comparing two triangles where a distance of $0$ indicates the triangles are similar, and $1$ indicates they are \emph{fully dissimilar}.
Quality Amplification of Error Prone Navigation for Swarms of Micro Aerial Vehicles (with Detailed Simulations)
Jun 27, 2019



We present an error tolerant path planning algorithm for Micro Aerial Vehicles (MAV) swarms. We assume a MAV navigation system without relying on GPS-like techniques. The MAV find their navigation path by using their sensors and cameras, in order to identify and follow a series of visual landmarks. The visual landmarks lead the MAV towards the target destination. MAVs are assumed to be unaware of the terrain and locations of the landmarks. Landmarks are also assumed to hold a-priori information, whose interpretation (by the MAVs) is prone to errors. We distinguish two types of errors, namely, recognition and advice. Recognition errors are due to misinterpretation of sensed data and a-priori information or confusion of objects (e.g., due to faulty sensors). Advice errors are due to outdated or wrong information associated to the landmarks (e.g., due to weather conditions). Our path planning algorithm proposes swarm cooperation. MAVs communicate and exchange information wirelessly, to minimize the {\em recognition} and {\em advice} error ratios. By doing this, the navigation system experiences a quality amplification in terms of error reduction. As a result, our solution successfully provides an adaptive error tolerant navigation system. Quality amplification is parametetrized with regard to the number of MAVs. We validate our approach with theoretical proofs and numeric simulations.