 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Pinching Antenna Optimization via Meta-Learning for Physical-Layer Security in Dynamic Wireless Networks
Dec 31, 2025This paper develops a gradient-based meta-learning framework for real-time control of waveguided pinching-antenna systems under user-location uncertainty and physical-layer security (PLS) constraints. A probabilistic system model is introduced to capture the impact of imperfect localization on outage performance and secrecy. Based on this model, a joint antenna-positioning and transmit-power optimization problem is formulated to satisfy probabilistic reliability and secrecy requirements. To enable rapid adaptation in highly dynamic environments, the proposed approach employs model-agnostic meta-learning (MAML) to learn a transferable initialization across diverse mobility and channel conditions, allowing few-shot online adaptation using limited pilot feedback. Simulation results demonstrate that the proposed framework significantly outperforms Reptile-based meta-learning, non-meta reinforcement learning, conventional optimization, static antenna placement, and power-only control in terms of outage probability, secrecy performance, and convergence latency. These results establish meta-learning as an effective tool for secure and low-latency control of reconfigurable pinching-antenna systems in non-stationary wireless environments.
Improved Gaussian-Bernoulli Restricted Boltzmann Machines for UAV-Ground Communication Systems
Jun 16, 2022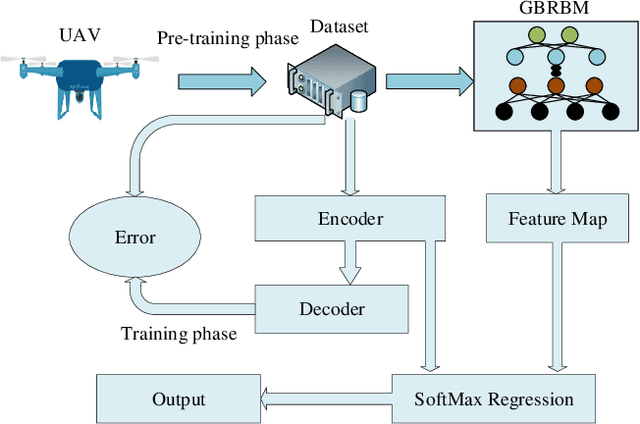
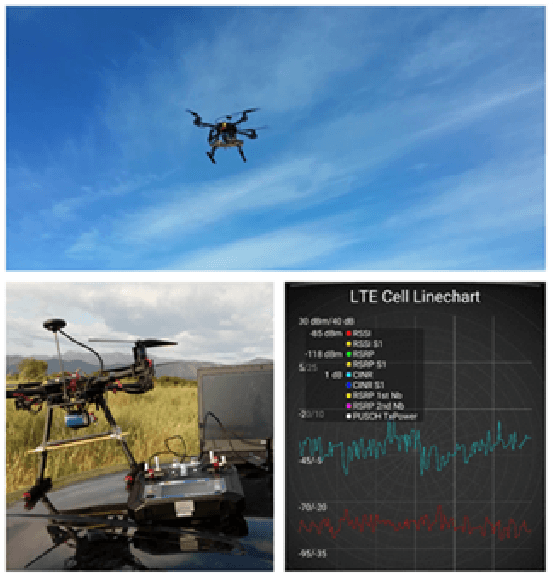
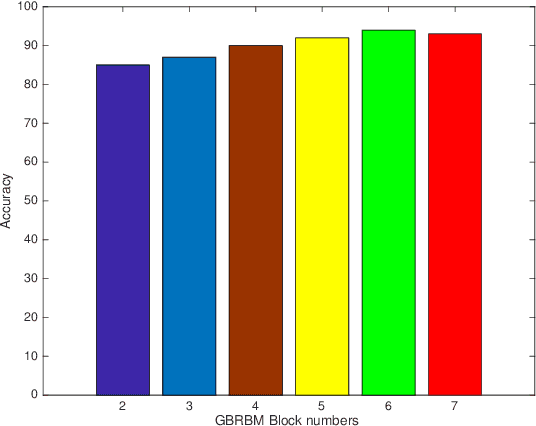
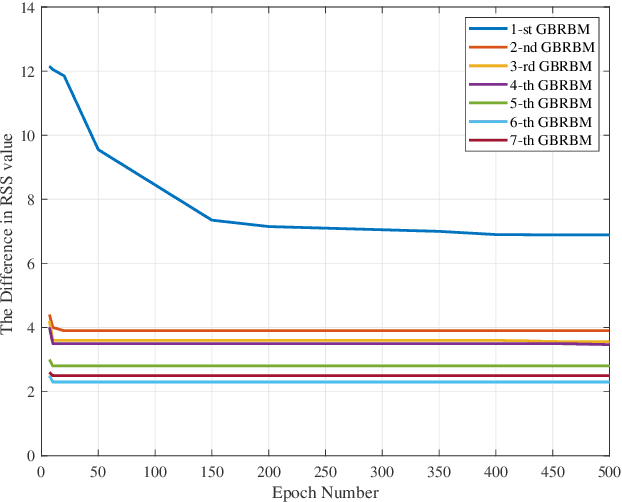
Unmanned aerial vehicle (UAV) is steadily growing as a promising technology for next-generation communication systems due to their appealing features such as wide coverage with high altitude, on-demand low-cost deployment, and fast responses. UAV communications are fundamentally different from the conventional terrestrial and satellite communications owing to the high mobility and the unique channel characteristics of air-ground links. However, obtaining effective channel state information (CSI) is challenging because of the dynamic propagation environment and variable transmission delay. In this paper, a deep learning (DL)-based CSI prediction framework is proposed to address channel aging problem by extracting the most discriminative features from the UAV wireless signals. Specifically, we develop a procedure of multiple Gaussian Bernoulli restricted Boltzmann machines (GBRBM) for dimension reduction and pre-training utilization incorporated with an autoencoder-based deep neural networks (DNNs). To evaluate the proposed approach, real data measurements from an UAV communicating with base-stations within a commercial cellular network are obtained and used for training and validation. Numerical results demonstrate that the proposed method is accurate in channel acquisition for various UAV flying scenarios and outperforms the conventional DNNs.
Deep Learning-Based Device-Free Localization in Wireless Sensor Networks
Jun 16, 2022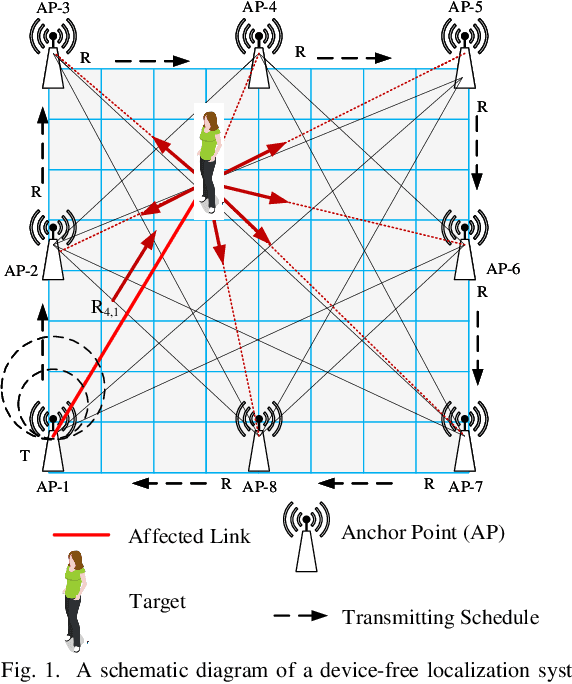
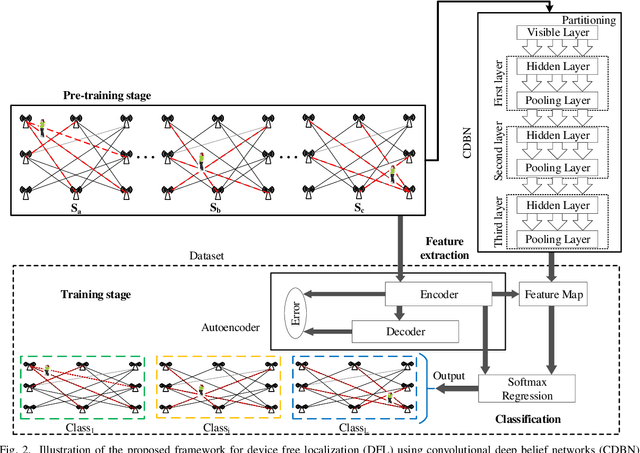
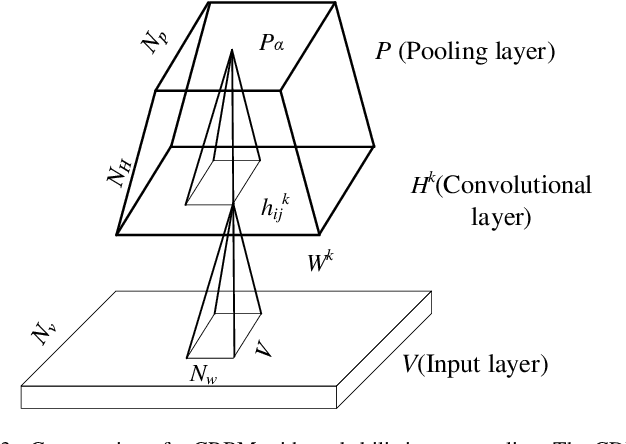

Location-based services (LBS) are witnessing a rise in popularity owing to their key features of delivering powerful and personalized digital experiences. The recent developments in wireless sensing techniques make the realization of device-free localization (DFL) feasible in wireless sensor networks. The DFL is an emerging technology that utilizes radio signal information for detecting and positioning a passive target while the target is not equipped with a wireless device. However, determining the characteristics of the massive raw signals and extracting meaningful discriminative features relevant to the localization are highly intricate tasks. Thus, deep learning (DL) techniques can be utilized to address the DFL problem due to their unprecedented performance gains in many practical problems. In this direction, we propose a DFL framework consists of multiple convolutional neural network (CNN) layers along with autoencoders based on the restricted Boltzmann machines (RBM) to construct a convolutional deep belief network (CDBN) for features recognition and extracting. Each layer has stochastic pooling to sample down the feature map and reduced the dimensions of the required data for precise localization. The proposed framework is validated using real experimental dataset. The results show that our algorithm can achieve a high accuracy of 98% with reduced data dimensions and low signal-to-noise ratios (SNRs).