 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive reinforcement learning of multi-agent ethically-aligned behaviours: the QSOM and QDSOM algorithms
Jul 02, 2023



The numerous deployed Artificial Intelligence systems need to be aligned with our ethical considerations. However, such ethical considerations might change as time passes: our society is not fixed, and our social mores evolve. This makes it difficult for these AI systems; in the Machine Ethics field especially, it has remained an under-studied challenge. In this paper, we present two algorithms, named QSOM and QDSOM, which are able to adapt to changes in the environment, and especially in the reward function, which represents the ethical considerations that we want these systems to be aligned with. They associate the well-known Q-Table to (Dynamic) Self-Organizing Maps to handle the continuous and multi-dimensional state and action spaces. We evaluate them on a use-case of multi-agent energy repartition within a small Smart Grid neighborhood, and prove their ability to adapt, and their higher performance compared to baseline Reinforcement Learning algorithms.
Q-SMASH: Q-Learning-based Self-Adaptation of Human-Centered Internet of Things
Jul 13, 2021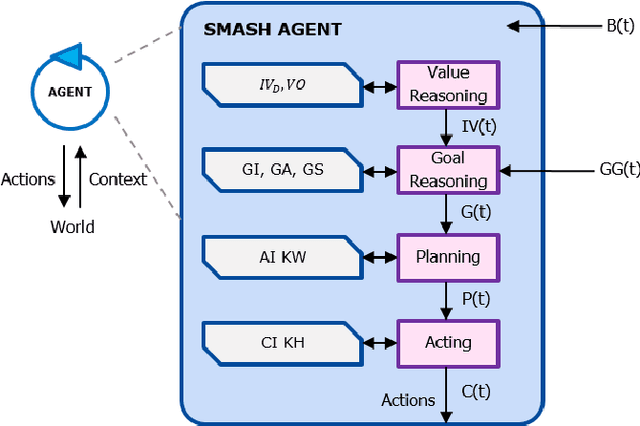
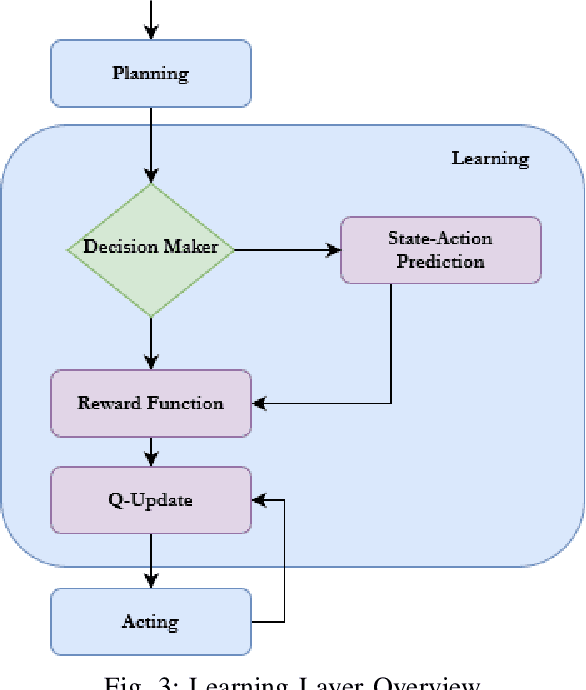
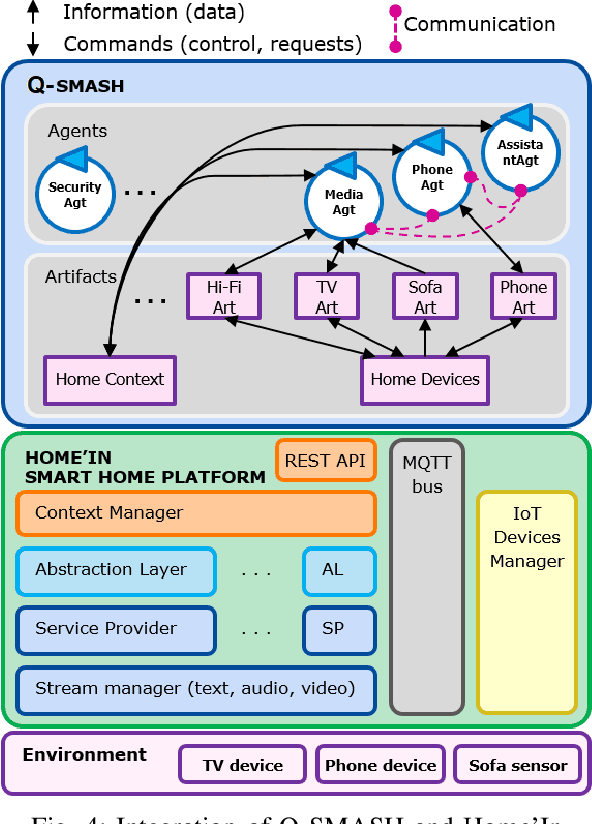
As the number of Human-Centered Internet of Things (HCIoT) applications increases, the self-adaptation of its services and devices is becoming a fundamental requirement for addressing the uncertainties of the environment in decision-making processes. Self-adaptation of HCIoT aims to manage run-time changes in a dynamic environment and to adjust the functionality of IoT objects in order to achieve desired goals during execution. SMASH is a semantic-enabled multi-agent system for self-adaptation of HCIoT that autonomously adapts IoT objects to uncertainties of their environment. SMASH addresses the self-adaptation of IoT applications only according to the human values of users, while the behavior of users is not addressed. This article presents Q-SMASH: a multi-agent reinforcement learning-based approach for self-adaptation of IoT objects in human-centered environments. Q-SMASH aims to learn the behaviors of users along with respecting human values. The learning ability of Q-SMASH allows it to adapt itself to the behavioral change of users and make more accurate decisions in different states and situations.
SMASH: a Semantic-enabled Multi-agent Approach for Self-adaptation of Human-centered IoT
May 31, 2021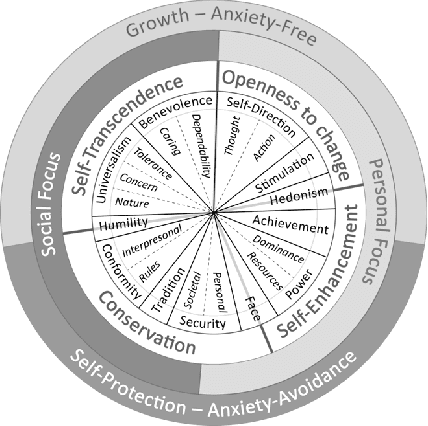

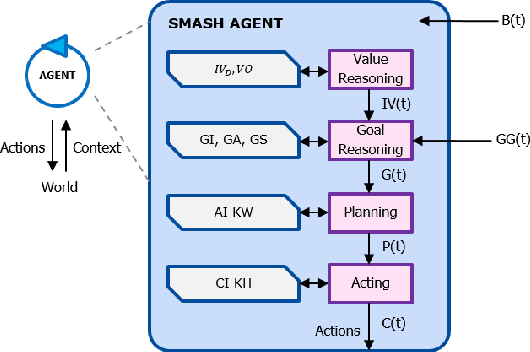
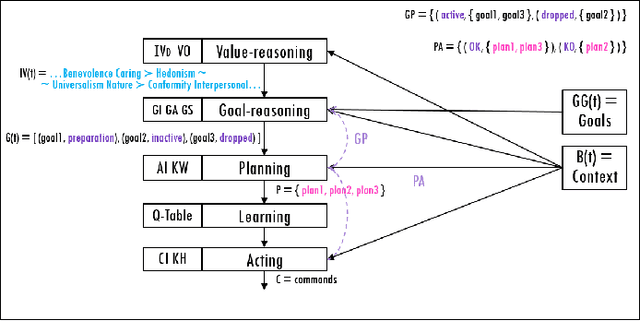
Nowadays, IoT devices have an enlarging scope of activities spanning from sensing, computing to acting and even more, learning, reasoning and planning. As the number of IoT applications increases, these objects are becoming more and more ubiquitous. Therefore, they need to adapt their functionality in response to the uncertainties of their environment to achieve their goals. In Human-centered IoT, objects and devices have direct interactions with human beings and have access to online contextual information. Self-adaptation of such applications is a crucial subject that needs to be addressed in a way that respects human goals and human values. Hence, IoT applications must be equipped with self-adaptation techniques to manage their run-time uncertainties locally or in cooperation with each other. This paper presents SMASH: a multi-agent approach for self-adaptation of IoT applications in human-centered environments. In this paper, we have considered the Smart Home as the case study of smart environments. SMASH agents are provided with a 4-layer architecture based on the BDI agent model that integrates human values with goal-reasoning, planning, and acting. It also takes advantage of a semantic-enabled platform called Home'In to address interoperability issues among non-identical agents and devices with heterogeneous protocols and data formats. This approach is compared with the literature and is validated by developing a scenario as the proof of concept. The timely responses of SMASH agents show the feasibility of the proposed approach in human-centered environments.