 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Union of Integer Hypercubes with Queries (Technical Report)
May 27, 2021


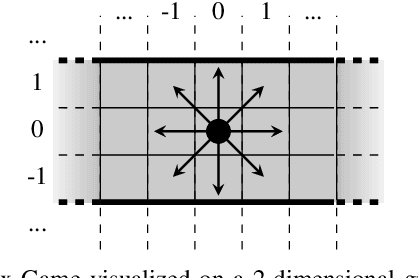
We study the problem of learning a finite union of integer (axis-aligned) hypercubes over the d-dimensional integer lattice, i.e., whose edges are parallel to the coordinate axes. This is a natural generalization of the classic problem in the computational learning theory of learning rectangles. We provide a learning algorithm with access to a minimally adequate teacher (i.e. membership and equivalence oracles) that solves this problem in polynomial-time, for any fixed dimension d. Over a non-fixed dimension, the problem subsumes the problem of learning DNF boolean formulas, a central open problem in the field. We have also provided extensions to handle infinite hypercubes in the union, as well as showing how subset queries could improve the performance of the learning algorithm in practice. Our problem has a natural application to the problem of monadic decomposition of quantifier-free integer linear arithmetic formulas, which has been actively studied in recent years. In particular, a finite union of integer hypercubes correspond to a finite disjunction of monadic predicates over integer linear arithmetic (without modulo constraints). Our experiments suggest that our learning algorithms substantially outperform the existing algorithms.
Learning-Based Synthesis of Safety Controllers
Jan 21, 2019

We propose a machine learning framework to synthesize reactive controllers for systems whose interactions with their adversarial environment are modeled by infinite-duration, two-player games over (potentially) infinite graphs. Our framework targets safety games with infinitely many vertices, but it is also applicable to safety games over finite graphs whose size is too prohibitive for conventional synthesis techniques. The learning takes place in a feedback loop between a teacher component, which can reason symbolically about the safety game, and a learning algorithm, which successively learns an overapproximation of the winning region from various kinds of examples provided by the teacher. We develop a novel decision tree learning algorithm for this setting and show that our algorithm is guaranteed to converge to a reactive safety controller if a suitable overapproximation of the winning region can be expressed as a decision tree. Finally, we evaluate the performance of our framework on examples motivated by robotic motion planning.