Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning References with Gaussian Processes in Model Predictive Control applied to Robot Assisted Surgery
Nov 25, 2019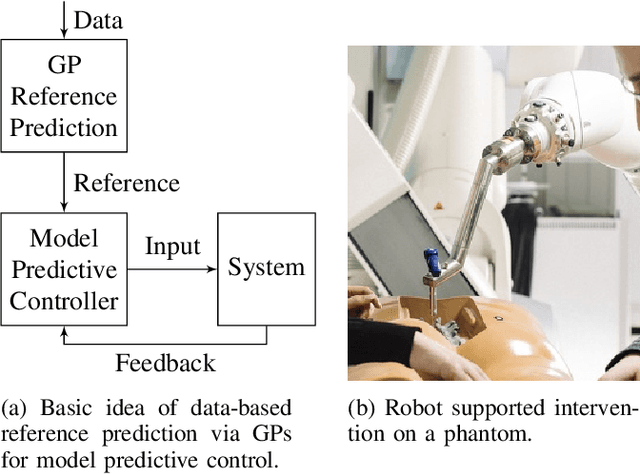
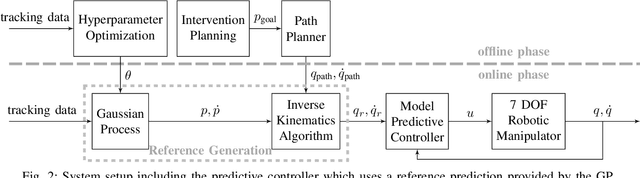

One of the key benefits of model predictive control is the capability of controlling a system proactively in the sense of taking the future system evolution into account. However, often external disturbances or references are not a priori known, which renders the predictive controllers shortsighted or uninformed. Adaptive prediction models can be used to overcome this issue and provide predictions of these signals to the controller. In this work we propose to learn references via Gaussian processes for model predictive controllers. To illustrate the approach, we consider robot assisted surgery, where a robotic manipulator needs to follow a learned reference position based on optical tracking measurements.
Via