 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHMD-EgoPose: Head-Mounted Display-Based Egocentric Marker-Less Tool and Hand Pose Estimation for Augmented Surgical Guidance
Feb 24, 2022
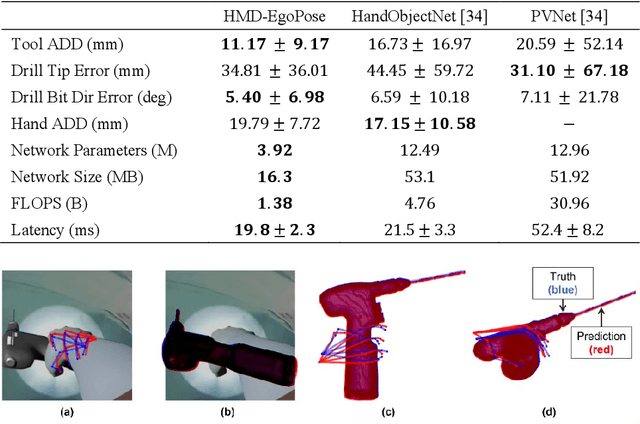


The success or failure of modern computer-assisted surgery procedures hinges on the precise six-degree-of-freedom (6DoF) position and orientation (pose) estimation of tracked instruments and tissue. In this paper, we present HMD-EgoPose, a single-shot learning-based approach to hand and object pose estimation and demonstrate state-of-the-art performance on a benchmark dataset for monocular red-green-blue (RGB) 6DoF marker-less hand and surgical instrument pose tracking. Further, we reveal the capacity of our HMD-EgoPose framework for 6DoF near real-time pose estimation on a commercially available optical see-through head-mounted display (OST-HMD) through a low-latency streaming approach. Our framework utilized an efficient convolutional neural network (CNN) backbone for multi-scale feature extraction and a set of subnetworks to jointly learn the 6DoF pose representation of the rigid surgical drill instrument and the grasping orientation of the hand of a user. To make our approach accessible to a commercially available OST-HMD, the Microsoft HoloLens 2, we created a pipeline for low-latency video and data communication with a high-performance computing workstation capable of optimized network inference. HMD-EgoPose outperformed current state-of-the-art approaches on a benchmark dataset for surgical tool pose estimation, achieving an average tool 3D vertex error of 11.0 mm on real data and furthering the progress towards a clinically viable marker-free tracking strategy. Through our low-latency streaming approach, we achieved a round trip latency of 202.5 ms for pose estimation and augmented visualization of the tracked model when integrated with the OST-HMD. Our single-shot learned approach was robust to occlusion and complex surfaces and improved on current state-of-the-art approaches to marker-less tool and hand pose estimation.
SurgeonAssist-Net: Towards Context-Aware Head-Mounted Display-Based Augmented Reality for Surgical Guidance
Jul 13, 2021



We present SurgeonAssist-Net: a lightweight framework making action-and-workflow-driven virtual assistance, for a set of predefined surgical tasks, accessible to commercially available optical see-through head-mounted displays (OST-HMDs). On a widely used benchmark dataset for laparoscopic surgical workflow, our implementation competes with state-of-the-art approaches in prediction accuracy for automated task recognition, and yet requires 7.4x fewer parameters, 10.2x fewer floating point operations per second (FLOPS), is 7.0x faster for inference on a CPU, and is capable of near real-time performance on the Microsoft HoloLens 2 OST-HMD. To achieve this, we make use of an efficient convolutional neural network (CNN) backbone to extract discriminative features from image data, and a low-parameter recurrent neural network (RNN) architecture to learn long-term temporal dependencies. To demonstrate the feasibility of our approach for inference on the HoloLens 2 we created a sample dataset that included video of several surgical tasks recorded from a user-centric point-of-view. After training, we deployed our model and cataloged its performance in an online simulated surgical scenario for the prediction of the current surgical task. The utility of our approach is explored in the discussion of several relevant clinical use-cases. Our code is publicly available at https://github.com/doughtmw/surgeon-assist-net.