 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn fusing active and passive acoustic sensing for simultaneous localization and mapping
Apr 19, 2024Studies on the social behaviors of bats show that they have the ability to eavesdrop on the signals emitted by conspecifics in their vicinity. They can fuse this ``passive" data with actively collected data from their own signals to get more information about their environment, allowing them to fly and hunt more efficiently and to avoid or cause jamming when competing for prey. Acoustic sensors are capable of similar feats but are generally used in only an active or passive capacity at one time. Is there a benefit to using both active and passive sensing simultaneously in the same array? In this work we define a family of models for active, passive, and fused sensing systems to measure range and bearing data from an environment defined by point-based landmarks. These measurements are used to solve the problem of simultaneous localization and mapping (SLAM) with extended Kalman filter (EKF) and FastSLAM 2.0 approaches. Our results show agreement with previous findings. Specifically, when active sensing is limited to a narrow angular range, fused sensing can perform just as accurately if not better, while also allowing the sensor to perceive more of the surrounding environment.
Anticipatory Human-Robot Path Planning for Search and Rescue
Sep 08, 2020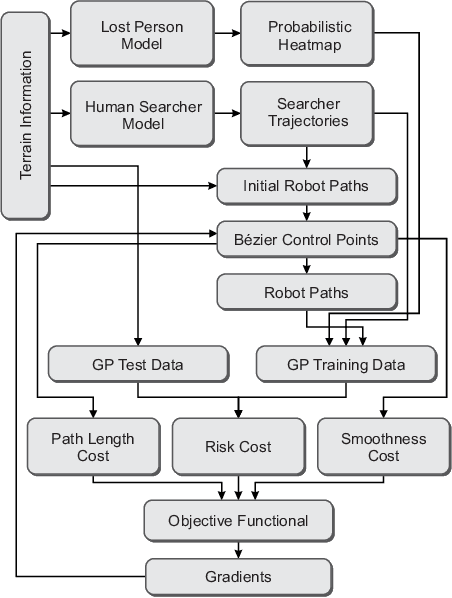
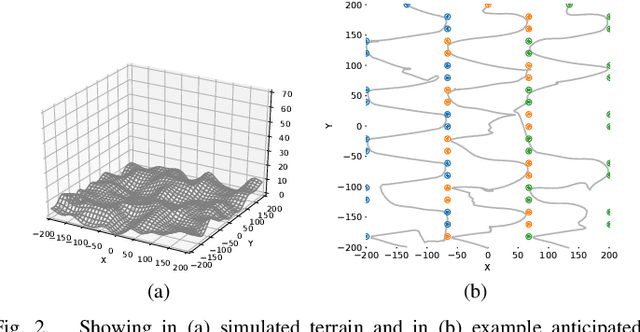
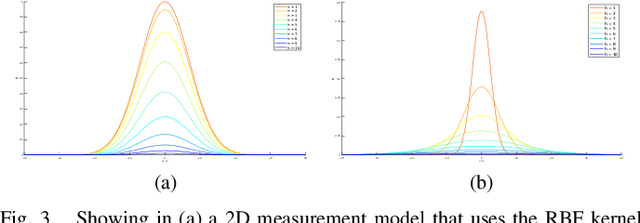
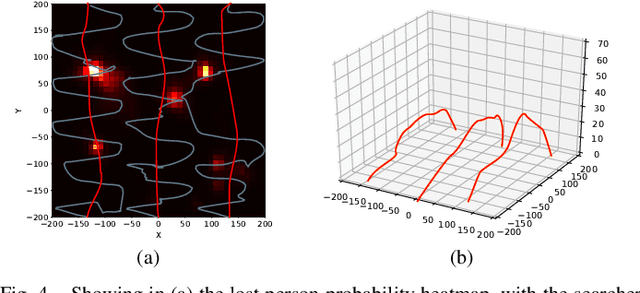
In this work, our goal is to extend the existing search and rescue paradigm by allowing teams of autonomous unmanned aerial vehicles (UAVs) to collaborate effectively with human searchers on the ground. We derive a framework that includes a simulated lost person behavior model, as well as a human searcher behavior model that is informed by data collected from past search tasks. These models are used together to create a probabilistic heatmap of the lost person's position and anticipated searcher trajectories. We then use Gaussian processes with a Gibbs' kernel to accurately model a limited field-of-view (FOV) sensor, e.g., thermal cameras, from which we derive a risk metric that drives UAV path optimization. Our framework finally computes a set of search paths for a team of UAVs to autonomously complement human searchers' efforts.