 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerception-Intention-Action Cycle in Human-Robot Collaborative Tasks
Jun 01, 2022
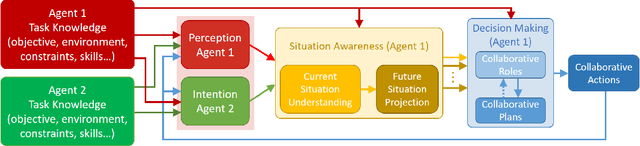


In this work we argue that in Human-Robot Collaboration (HRC) tasks, the Perception-Action cycle in HRC tasks can not fully explain the collaborative behaviour of the human and robot and it has to be extended to Perception-Intention-Action cycle, where Intention is a key topic. In some cases, agent Intention can be perceived or inferred by the other agent, but in others, it has to be explicitly informed to the other agent to succeed the goal of the HRC task. The Perception-Intention-Action cycle includes three basic functional procedures: Perception-Intention, Situation Awareness and Action. The Perception and the Intention are the input of the Situation Awareness, which evaluates the current situation and projects it, into the future situation. The agents receive this information, plans and agree with the actions to be executed and modify their action roles while perform the HRC task. In this work, we validate the Perception-Intention-Action cycle in a joint object transportation task, modeling the Perception-Intention-Action cycle through a force model which uses real life and social forces. The perceived world is projected into a force world and the human intention (perceived or informed) is also modelled as a force that acts in the HRC task. Finally, we show that the action roles (master-slave, collaborative, neutral or adversary) are intrinsic to any HRC task and they appear in the different steps of a collaborative sequence of actions performed during the task.