 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConnecting the geometry and dynamics of many-body complex systems with message passing neural operators
Feb 21, 2025The relationship between scale transformations and dynamics established by renormalization group techniques is a cornerstone of modern physical theories, from fluid mechanics to elementary particle physics. Integrating renormalization group methods into neural operators for many-body complex systems could provide a foundational inductive bias for learning their effective dynamics, while also uncovering multiscale organization. We introduce a scalable AI framework, ROMA (Renormalized Operators with Multiscale Attention), for learning multiscale evolution operators of many-body complex systems. In particular, we develop a renormalization procedure based on neural analogs of the geometric and laplacian renormalization groups, which can be co-learned with neural operators. An attention mechanism is used to model multiscale interactions by connecting geometric representations of local subgraphs and dynamical operators. We apply this framework in challenging conditions: large systems of more than 1M nodes, long-range interactions, and noisy input-output data for two contrasting examples: Kuramoto oscillators and Burgers-like social dynamics. We demonstrate that the ROMA framework improves scalability and positive transfer between forecasting and effective dynamics tasks compared to state-of-the-art operator learning techniques, while also giving insight into multiscale interactions. Additionally, we investigate power law scaling in the number of model parameters, and demonstrate a departure from typical power law exponents in the presence of hierarchical and multiscale interactions.
Inductive detection of Influence Operations via Graph Learning
May 26, 2023

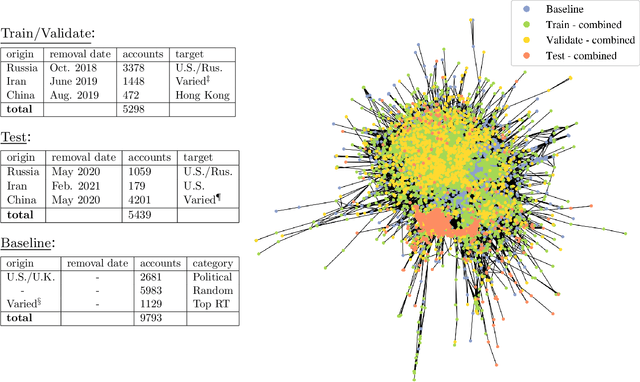

Influence operations are large-scale efforts to manipulate public opinion. The rapid detection and disruption of these operations is critical for healthy public discourse. Emergent AI technologies may enable novel operations which evade current detection methods and influence public discourse on social media with greater scale, reach, and specificity. New methods with inductive learning capacity will be needed to identify these novel operations before they indelibly alter public opinion and events. We develop an inductive learning framework which: 1) determines content- and graph-based indicators that are not specific to any operation; 2) uses graph learning to encode abstract signatures of coordinated manipulation; and 3) evaluates generalization capacity by training and testing models across operations originating from Russia, China, and Iran. We find that this framework enables strong cross-operation generalization while also revealing salient indicators$\unicode{x2013}$illustrating a generic approach which directly complements transductive methodologies, thereby enhancing detection coverage.