 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving behavior profile discovery for vehicles
Sep 24, 2024

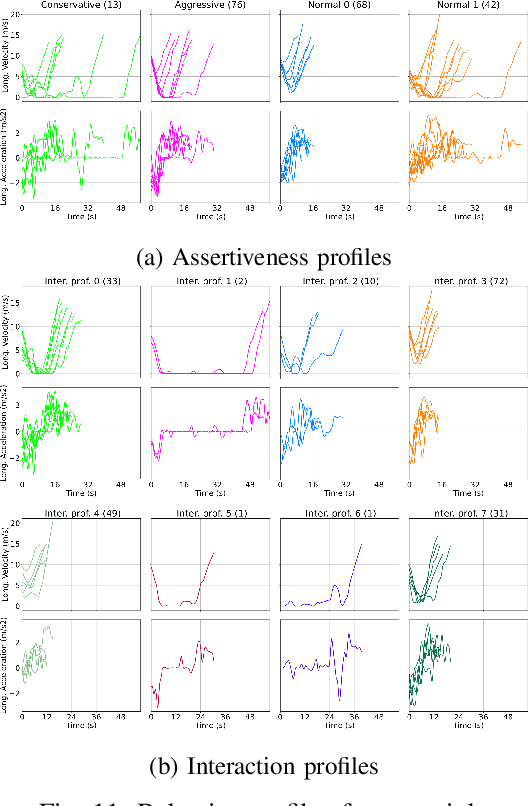
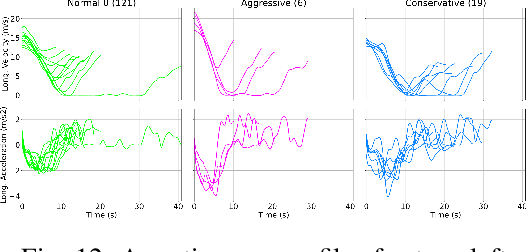
Multiple approaches have already been proposed to mimic real driver behaviors in simulation. This article proposes a new one, based solely on the exploration of undisturbed observation of intersections. From them, the behavior profiles for each macro-maneuver will be discovered. Using the macro-maneuvers already identified in previous works, a comparison method between trajectories with different lengths using an Extended Kalman Filter (EKF) is proposed, which combined with an Expectation-Maximization (EM) inspired method, defines the different clusters that represent the behaviors observed. This is also paired with a Kullback-Liebler divergent (KL) criteria to define when the clusters need to be split or merged. Finally, the behaviors for each macro-maneuver are determined by each cluster discovered, without using any map information about the environment and being dynamically consistent with vehicle motion. By observation it becomes clear that the two main factors for driver's behavior are their assertiveness and interaction with other road users.
Fast maneuver recovery from aerial observation: trajectory clustering and outliers rejection
Jul 03, 2024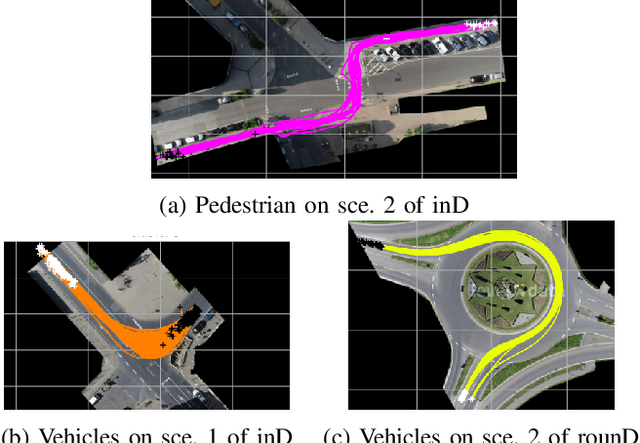
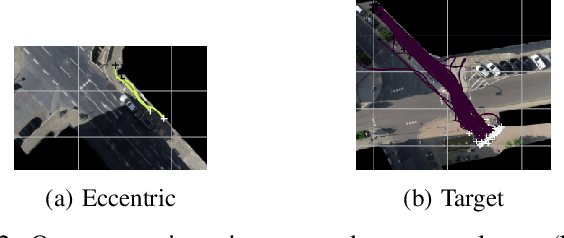
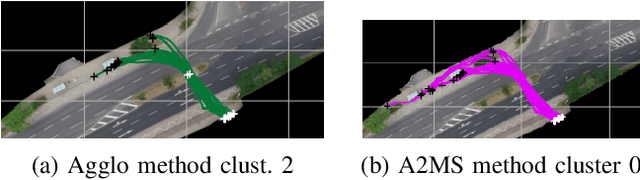
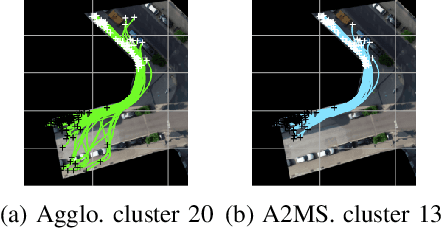
The implementation of road user models that realistically reproduce a credible behavior in a multi-agentsimulation is still an open problem. A data-driven approach consists on to deduce behaviors that may exist in real situation to obtain different types of trajectories from a large set of observations. The data, and its classification, could then be used to train models capable to extrapolate such behavior. Cars and two different types of Vulnerable Road Users (VRU) will be considered by the trajectory clustering methods proposed: pedestrians and cyclists. The results reported here evaluate methods to extract well-defined trajectory classes from raw data without the use of map information while also separating ''eccentric'' or incomplete trajectories from the ones that are complete and representative in any scenario. Two environments will serve as test for the methods develop, three different intersections and one roundabout. The resulting clusters of trajectories can then be used for prediction or learning tasks or discarded if it is composed by outliers.
Automated Driving Without Ethics: Meaning, Design and Real-World Implementation
Aug 09, 2023

The ethics of automated vehicles (AV) has received a great amount of attention in recent years, specifically in regard to their decisional policies in accident situations in which human harm is a likely consequence. After a discussion about the pertinence and cogency of the term 'artificial moral agent' to describe AVs that would accomplish these sorts of decisions, and starting from the assumption that human harm is unavoidable in some situations, a strategy for AV decision making is proposed using only pre-defined parameters to characterize the risk of possible accidents and also integrating the Ethical Valence Theory, which paints AV decision-making as a type of claim mitigation, into multiple possible decision rules to determine the most suitable action given the specific environment and decision context. The goal of this approach is not to define how moral theory requires vehicles to behave, but rather to provide a computational approach that is flexible enough to accommodate a number of human 'moral positions' concerning what morality demands and what road users may expect, offering an evaluation tool for the social acceptability of an automated vehicle's decision making.