 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Propelled Soft Everting Toroidal Robot for Navigation and Climbing in Confined Spaces
Mar 28, 2022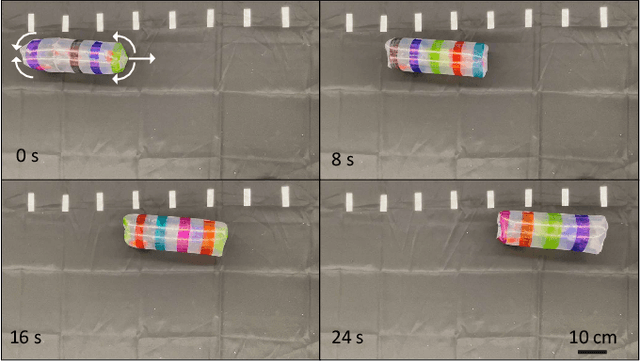
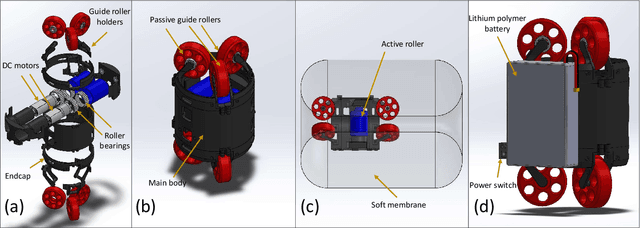
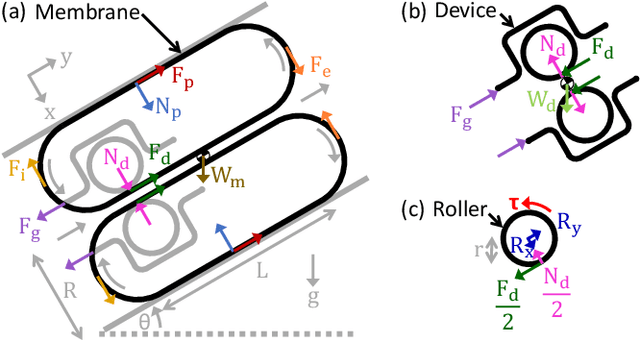
There are many spaces inaccessible to humans where robots could help deliver sensors and equipment. Many of these spaces contain three-dimensional passageways and uneven terrain that pose challenges for robot design and control. Everting toroidal robots, which move via simultaneous eversion and inversion of their body material, are promising for navigation in these types of spaces. We present a novel soft everting toroidal robot that propels itself using a motorized device inside an air-filled membrane. Our robot requires only a single control signal to move, can conform to its environment, and can climb vertically with a motor torque that is independent of the force used to brace the robot against its environment. We derive and validate models of the forces involved in its motion, and we demonstrate the robot's ability to navigate a maze and climb a pipe.