 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Prediction Uncertainty Estimates from BatchEnsemble
Jan 29, 2026Deep learning models struggle with uncertainty estimation. Many approaches are either computationally infeasible or underestimate uncertainty. We investigate \textit{BatchEnsemble} as a general and scalable method for uncertainty estimation across both tabular and time series tasks. To extend BatchEnsemble to sequential modeling, we introduce GRUBE, a novel BatchEnsemble GRU cell. We compare the BatchEnsemble to Monte Carlo dropout and deep ensemble models. Our results show that BatchEnsemble matches the uncertainty estimation performance of deep ensembles, and clearly outperforms Monte Carlo dropout. GRUBE achieves similar or better performance in both prediction and uncertainty estimation. These findings show that BatchEnsemble and GRUBE achieve similar performance with fewer parameters and reduced training and inference time compared to traditional ensembles.
SO(3)-Equivariant Neural Networks for Learning Vector Fields on Spheres
Mar 12, 2025Analyzing vector fields on the sphere, such as wind speed and direction on Earth, is a difficult task. Models should respect both the rotational symmetries of the sphere and the inherent symmetries of the vector fields. In this paper, we introduce a deep learning architecture that respects both symmetry types using novel techniques based on group convolutions in the 3-dimensional rotation group. This architecture is suitable for scalar and vector fields on the sphere as they can be described as equivariant signals on the 3-dimensional rotation group. Experiments show that our architecture achieves lower prediction and reconstruction error when tested on rotated data compared to both standard CNNs and spherical CNNs.
Stable Update of Regression Trees
Feb 21, 2024Updating machine learning models with new information usually improves their predictive performance, yet, in many applications, it is also desirable to avoid changing the model predictions too much. This property is called stability. In most cases when stability matters, so does explainability. We therefore focus on the stability of an inherently explainable machine learning method, namely regression trees. We aim to use the notion of empirical stability and design algorithms for updating regression trees that provide a way to balance between predictability and empirical stability. To achieve this, we propose a regularization method, where data points are weighted based on the uncertainty in the initial model. The balance between predictability and empirical stability can be adjusted through hyperparameters. This regularization method is evaluated in terms of loss and stability and assessed on a broad range of data characteristics. The results show that the proposed update method improves stability while achieving similar or better predictive performance. This shows that it is possible to achieve both predictive and stable results when updating regression trees.
Semi Conditional Variational Auto-Encoder for Flow Reconstruction and Uncertainty Quantification from Limited Observations
Jul 19, 2020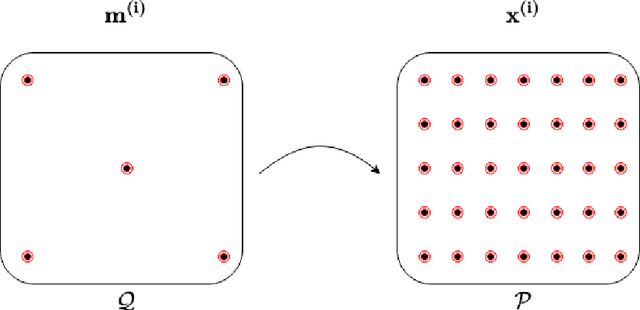
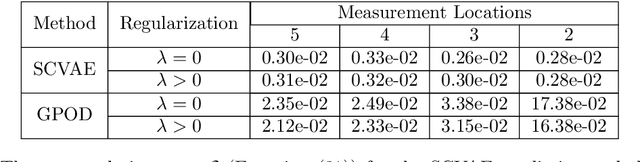

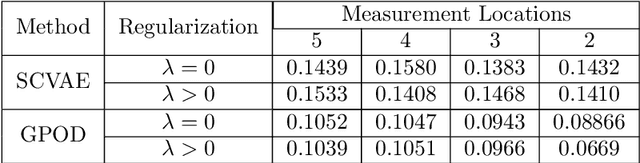
We present a new data-driven model to reconstruct nonlinear flow from spatially sparse observations. The model is a version of a conditional variational auto-encoder (CVAE), which allows for probabilistic reconstruction and thus uncertainty quantification of the prediction. We show that in our model, conditioning on the measurements from the complete flow data leads to a CVAE where only the decoder depends on the measurements. For this reason we call the model as Semi-Conditional Variational Autoencoder (SCVAE). The method, reconstructions and associated uncertainty estimates are illustrated on the velocity data from simulations of 2D flow around a cylinder and bottom currents from the Bergen Ocean Model. The reconstruction errors are compared to those of the Gappy Proper Orthogonal Decomposition (GPOD) method.